Flight 19 put Harry Tsepelias back in the left seat for another go in N997CZ. It wasn’t a formal test card — more of a shakedown and stick time — but it gave the autopilot a long, honest workout, and that finally pinned down a roll-autopilot squawk we’ve been chasing: it just wasn’t aggressive enough rolling into turns. The good news is everything else on the airplane behaved beautifully.
A quick snapshot of the flight: engine start 09:42, shutdown 11:19 — about 1.6 hours — out of KHEF, up to 7,830 ft MSL (8,238 ft GPS), 165 KIAS / 172 kt true at the fast end, 18.6 gallons burned (all from the right tank, no switch).
The autopilot is slow to roll into a turn
The squawk is easy to feel from the seat: dial in a big heading change with the heading bug, and the flight director snaps to a commanded bank — but the airplane is slow to roll into it, as if the servo can’t push the ailerons over. I’d been chasing it for a few flights mostly by adding muscle, walking the roll-servo maximum torque up 15% → ~40% → 90%. It helped, but never quite cured it. So I went digging in the logs to settle the real question: is the autopilot short on muscle, or just using it badly?
One other autopilot note worth logging: during a slower segment the system briefly went to its “minimum airspeed” protection (it annunciated for about 38 seconds, along with nose-up trim commands). That’s the autopilot refusing to fly slower than its configured floor — and it’s exactly why lowering that minimum-airspeed setting is on the to-do list, so the AP can fly the slower approaches we want for upcoming testing.
Following the thread: muscle or gain?
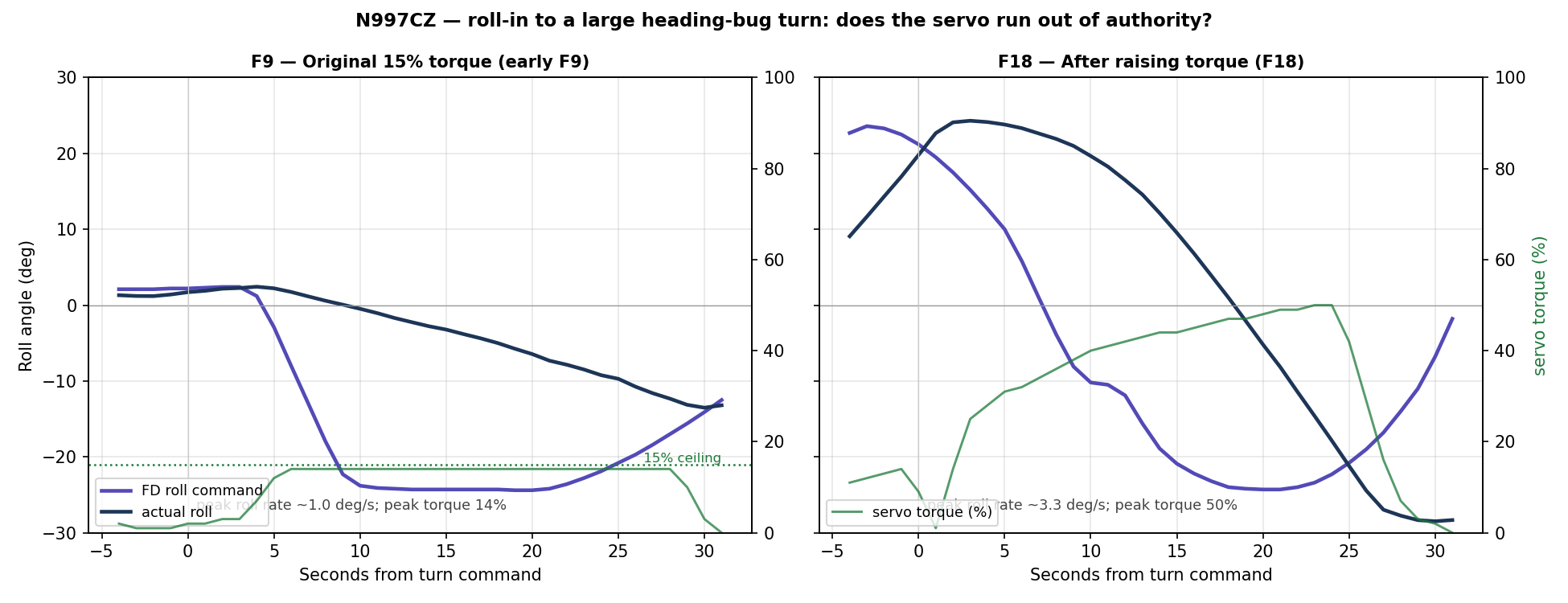
Early on, the sluggishness was real torque starvation. Back on Flight 9 the roll servo’s max torque was set to just 15%, and on a big heading-bug turn the servo pegged that 15% ceiling and the airplane rolled in at about 1° per second — never even reaching the commanded bank. That’s the “no strength to move the ailerons” feeling, and it’s exactly why I kept raising the torque.
Roll-in to a 24° heading-bug turn: at 15% torque (left) the servo pegs its ceiling and the airplane barely rolls; after raising it (right) the airplane follows the command.
Raising the torque fixed the authority problem. But here’s the catch: at the current 90% setting the roll-in is still gentle — and when I pull the numbers, the servo is only using about 20–45% of its torque during those turns. It never gets near 90%. It’s no longer out of muscle; it has plenty in reserve and simply isn’t using it.
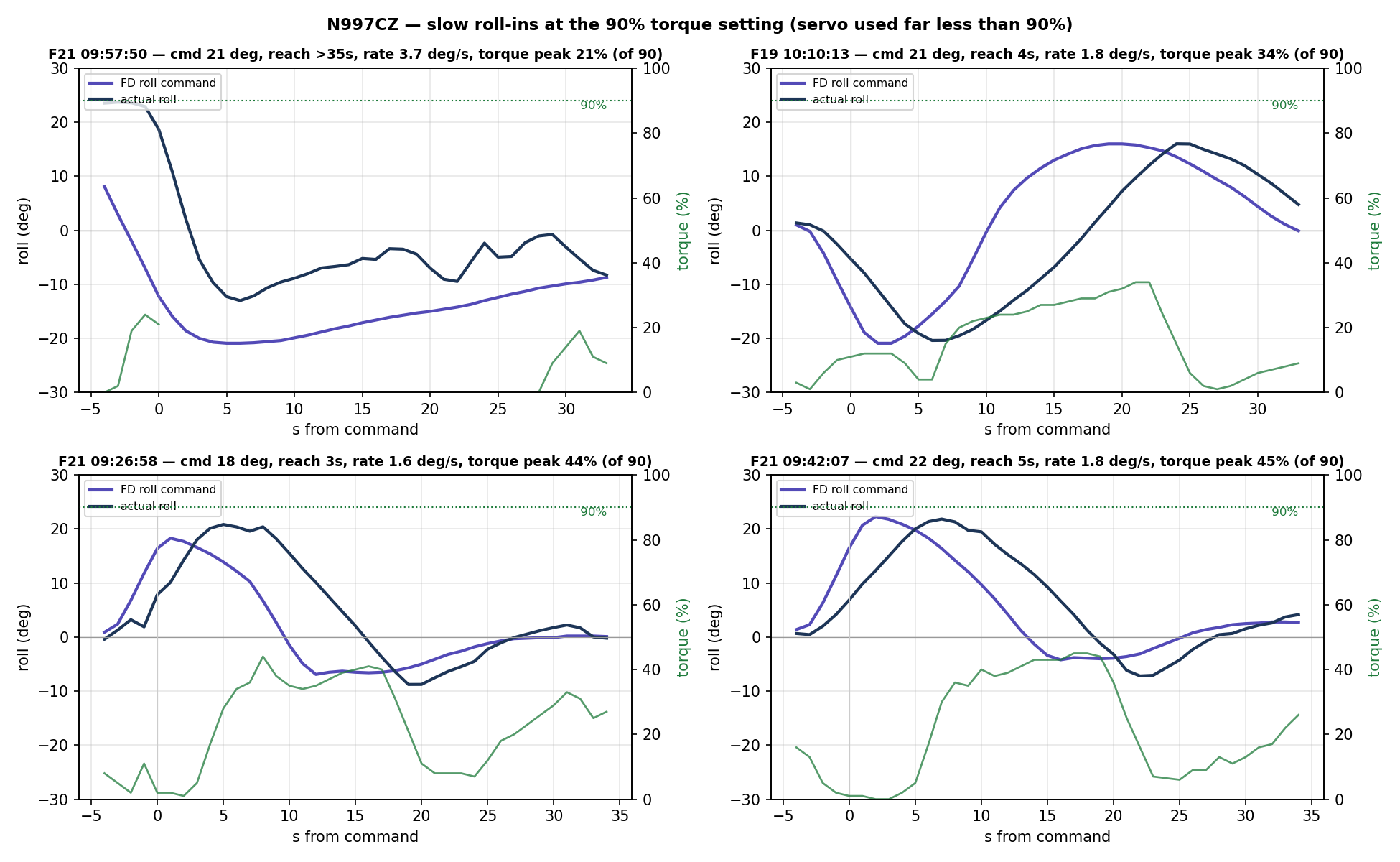
Four heading-bug turns at the 90% torque setting — the airplane (navy) lags the flight director command (purple) into the bank while servo torque (green) stays well below the 90% line.
In each of these four heading-bug turns, the actual roll trails the flight director’s commanded bank by several seconds, rolling in at only ~1–3° per second — and the servo torque sits far below the 90% line the whole time. The autopilot has authority to spare and just isn’t asking for it.
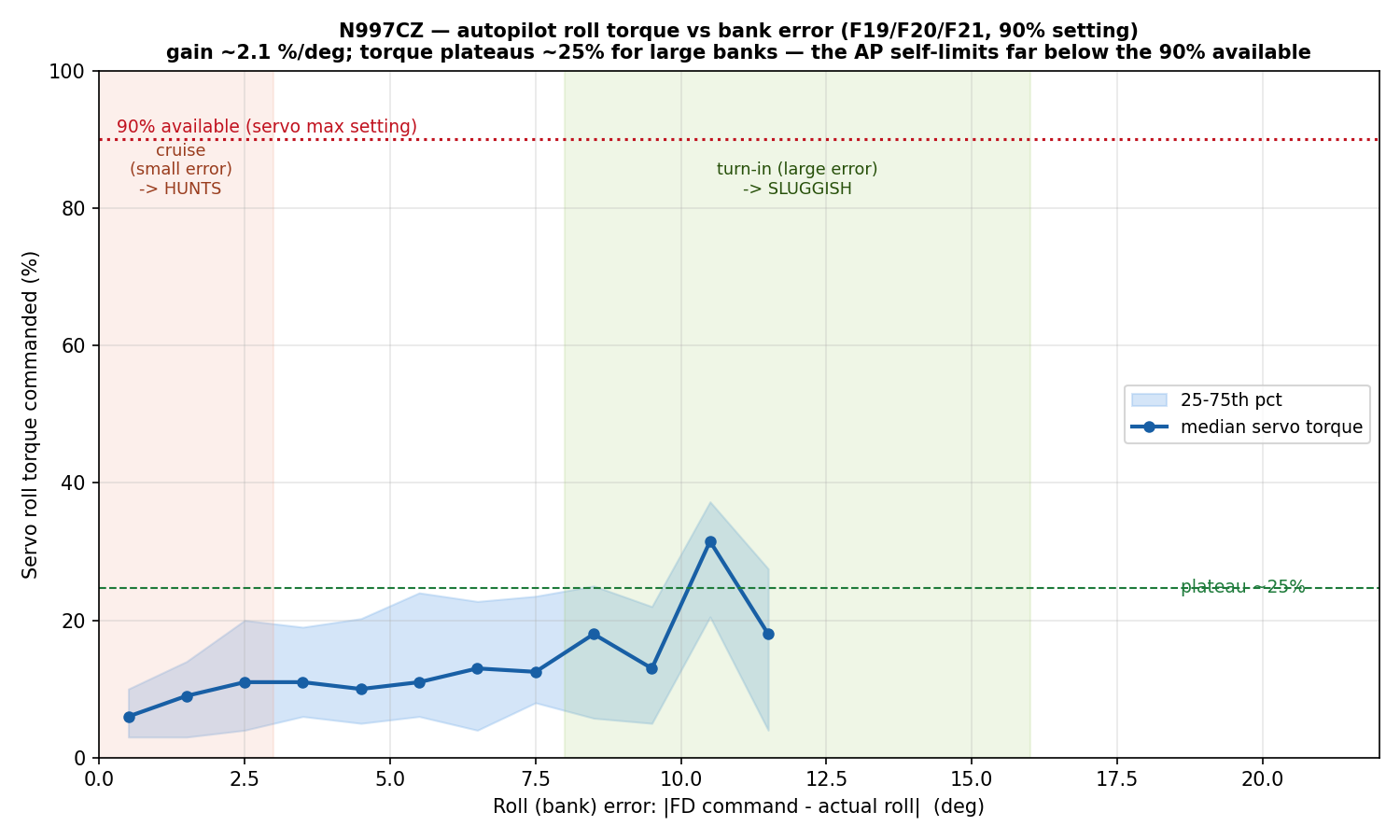
The clincher is the autopilot’s torque-versus-bank-error curve. Pooling every autopilot-flown turn on the recent flights, the servo commands only about 2% torque for every degree the airplane is off the commanded bank, and it plateaus around 25% even when the wing is more than 10° from where it should be:
Servo torque vs bank error — the gain is only ~2%/deg and torque plateaus near 25% of the 90% available.
That’s the signature of a roll gain set too low — the autopilot is under-driving a servo that has torque to spare. And Garmin’s roll servo has exactly two knobs: Max Torque (the muscle, which I’d been raising) and Roll Servo Gain — literally “how aggressively the servo moves the ailerons,” adjustable from 0.05 to 10.00. Mine is sitting around 0.6, down near the bottom of the range.
So I’d been turning the wrong knob. The fix for the sluggish turns isn’t more torque, it’s more gain — telling the servo to use the authority it already has. If raising the gain doesn’t crisp up the roll-in, the next suspect is mechanical friction in the aileron circuit, which the Garmin servo can test for with a clutch-slip check.
Everything else: healthy
While I chase the autopilot tuning, the rest of the airplane turned in one of its cleaner data sets:
Engine temps: the hottest cylinder head was Cylinder 5 at 416°F — still the air-dam “canary” that runs warmest in the climb — with Cylinder 4 coolest at 379°F. Everything comfortably under the 450°F redline.
Carbon monoxide: cabin CO peaked at 6 ppm (mean under 1) — benign, and the normal non-zero trace confirms the detector is reading correctly.
Attitude (AHRS): rock-solid. Another flight since Garmin replaced the second AHRS — cross-unit deviations stayed under 400%, with zero of the big >500% spikes from the bad-unit era and roll disagreement never over 2.3°. The roll squawk is an autopilot-tuning issue, not an attitude-sensing one — the AHRS knew exactly where the wing was.
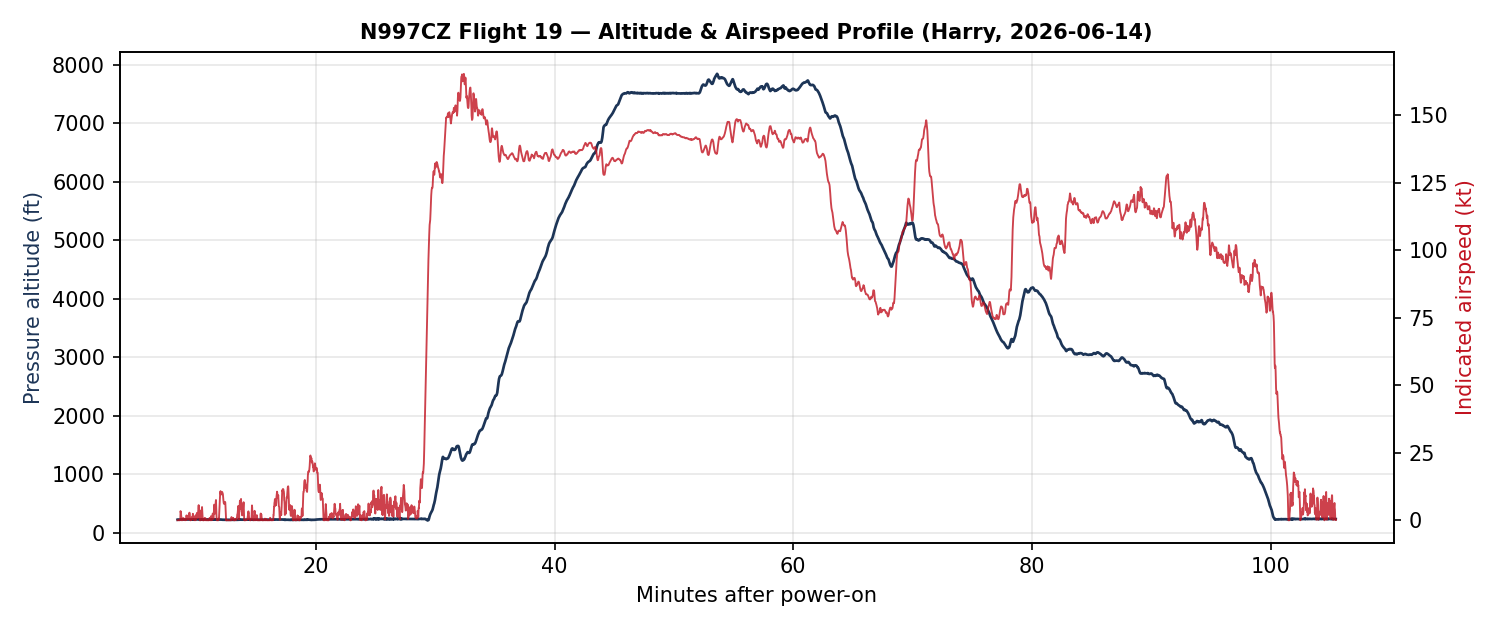
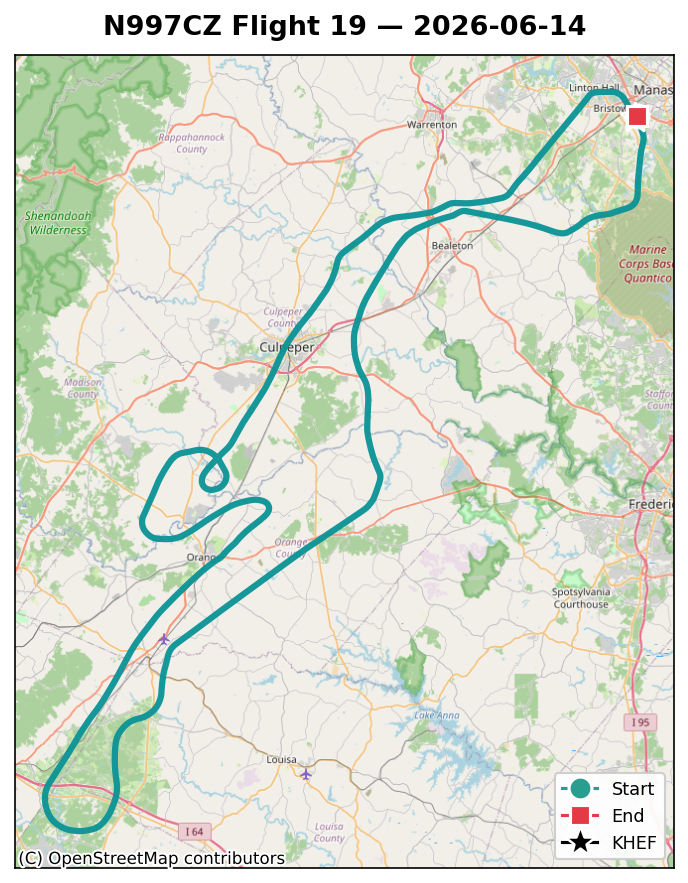
Flight 19 altitude and airspeed profile.Flight 19 ground track (KHEF test area).
Bottom line
Flight 19’s headline is a course correction, not a triumph: I’d been adding torque to a roll autopilot that was actually short on gain. The servo has muscle to spare — it uses only a quarter of what’s available — and just needs to be told to use it. So the next session is about raising the Roll Servo Gain a few steps at a time (Garmin’s in-air method: overpower the autopilot off the commanded bank, release, and watch how crisply it drives back), leaving the torque where it is. Engine, fuel, CO, and the overhauled attitude system all came home clean. Thanks to Harry for the stick time and the careful notes that made this one easy to pin down.
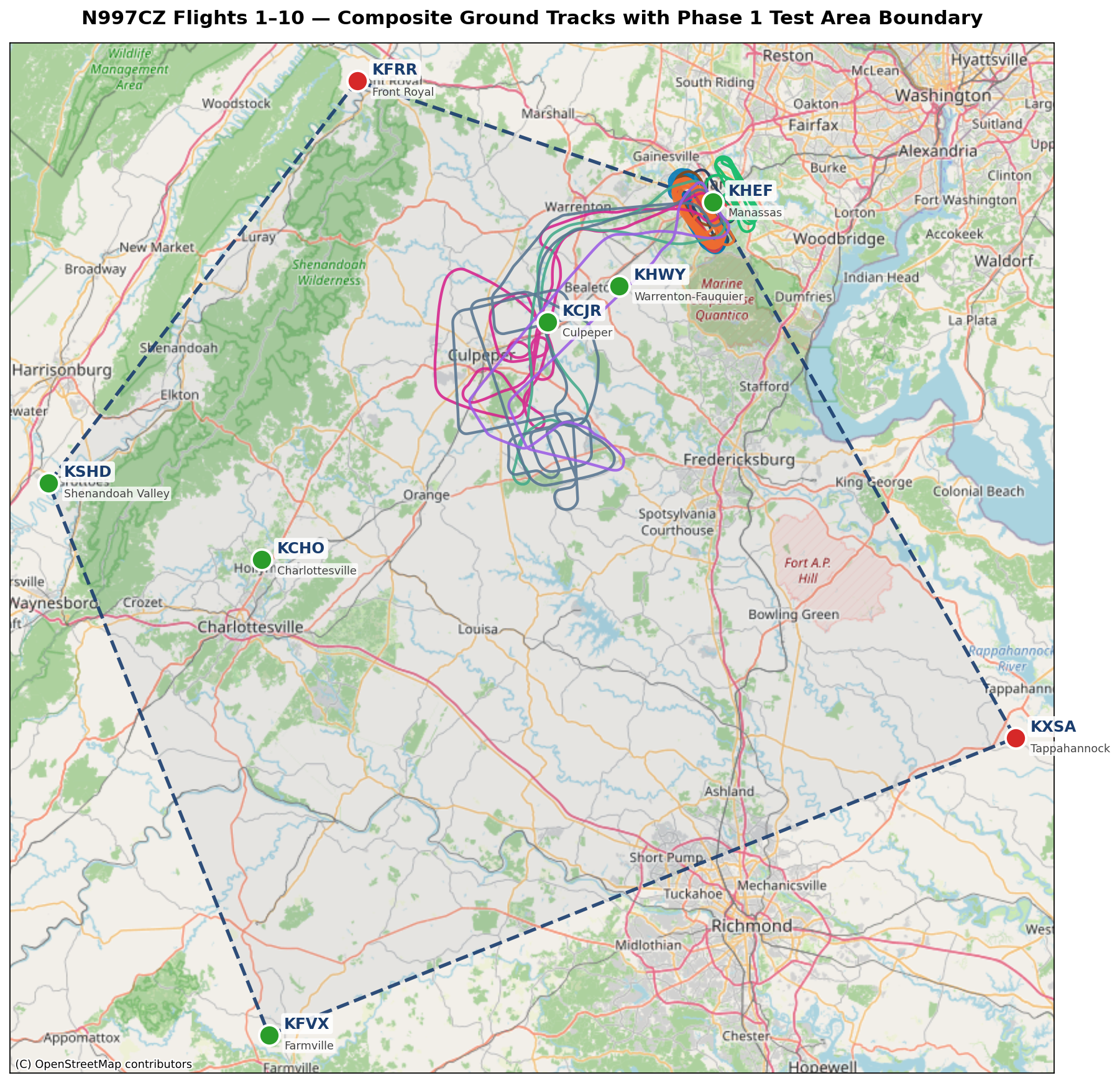
N997CZ Flights 1–10, color-coded, overlaid on the Phase 1 test-area pentagon. Green dots are airports where I’m approved to land; red dots are boundary corners where I am not.
Every experimental amateur-built airplane has to do its first few dozen hours of flying inside a defined geographic test area. That’s a Phase 1 requirement, written into the aircraft’s operating limitations and signed off by the FAA’s Designated Airworthiness Representative (DAR) when the airplane is issued its airworthiness certificate. You can fly anywhere you want inside the area; you can’t fly outside it until Phase 1 is complete.
I went into the conversation with my DAR with an ambitious proposal: twelve airports scattered across central Virginia, several of them anchoring the boundary of the test area and all of them on the approved landing list — places I could put the airplane down on a runway if anything went wrong. The DAR took a look and came back with a constraint from the FAA: the approved landing list had to be reduced to no more than six airports. Twelve was too many; six was the cap.
So we kept the boundary pentagon and pared the landing list down. Two of those concepts are now separate:
The boundary — the pentagon that encloses the test area — is defined by five waypoints:
KFRR — Front Royal-Warren County (NW corner)
KHEF — Manassas Regional (NE corner, my home base)
KXSA — Tappahannock-Essex County (SE corner)
KFVX — Farmville Regional (S corner)
KSHD — Shenandoah Valley Regional / Staunton (W corner)
The landing list — the six airports where I’m actually approved to put the airplane down — is six airports, three of which happen to also be on the boundary:
KHEF Manassas (boundary + landing)
KFVX Farmville (boundary + landing)
KSHD Shenandoah Valley (boundary + landing)
KHWY Warrenton-Fauquier (interior landing)
KCJR Culpeper Regional (interior landing)
KCHO Charlottesville-Albemarle (interior landing)
All six show up on the map as green dots. The remaining two boundary corners — KFRR (Front Royal) and KXSA (Tappahannock) — are red dots: they help define the shape of the test area, but I’m not approved to land there.
The constraint behind all of this came from a rule of thumb the DAR worked through with me: at the airplane’s cruise speed (~160 kt), I should be able to reach a runway within roughly a 30-minute leg. Thirty minutes at 160 knots is 80 nautical miles, and the six landing airports we kept are positioned so that no point inside the pentagon is more than that 80-nm window from one of them. That’s a reasonable margin while the engine is still breaking in.
The map at the top of this post overlays all ten Phase 1 flights so far on that pentagon. You can see how much of it I’ve actually been using: the first six flights (F1–F6) stayed close to KHEF — local pattern work and the early shakedown profiles. Starting with F7 I pushed out toward the Casanova / Culpeper practice area in the western part of the pentagon, and F8 / F9 / F10 all worked roughly in the same neighborhood. Most of the pentagon’s southern reach is still unflown.
There’s a lot of test card left to fly inside this shape, and plenty of room to do it.
We had hoped to be wheels-up by 6:30 AM. First flights have a way of humbling your schedule.
The day actually started on time — at around 6:30 AM we were already on the radio with the Manassas tower, working through the coordination that my operating limitations required before I could fly. That conversation shaped the flight plan for the morning. I asked the controller for 1,800 feet MSL inside the Class Delta, offset between one and two miles west of the runway, with north and southbound legs west of the field. It was a compromise altitude — lower than I would have liked for gliding distance safely, but it was as high as we could go inside the Delta without conflicting with Washington Dulles airspace to the north. The tower was accommodating and we had our area sorted.
What we didn’t have sorted quite yet was the aircraft. By the time we’d finished the walkaround, coordinated with the local fire department (who graciously agreed to stand by on-field — something I’d strongly recommend to any first-time experimental flyer), and began taxiing out, it was closer to 8:30. Two hours of pre-dawn nerves, checklists, and quiet conversations on the ramp.
The fire crew’s presence wasn’t just a safety net — it was a reminder of how seriously we were taking this. This wasn’t a routine departure. This was the culmination of years of building, hundreds of hours in the hangar, and a lot of faith in the process.
What Came Before: Engine Time at First Flight
One thing worth noting for anyone following along with their own build: we kept pre-flight engine running to an absolute minimum.
By the time we lined up on RWY34R that morning, the engine had seen just two cold starts and one brief taxi test to break in the brakes — probably less than 10 minutes of total run time prior to the day of the first flight. The conventional wisdom on Lycoming break-in is to get the engine to altitude quickly, run it hard, and let the rings seat properly. So we kept ground time short and intentional. I believe this is also to prevent “gazing” the cylinder walls — a condition that can occur from prolonged low-power operations before the engine is thoroughly broken in, and which can make proper ring seating much harder to achieve afterward.
That philosophy was tested on the morning itself. The long taxi out gave the engine time to heat up, and by the time we completed our run-up, CHTs had climbed to around 405°F — already nudging our yellow warning limit. I made the call to pull back to idle for a couple of minutes and let things cool down before attempting the takeoff roll. It was the right call: temperatures settled, we confirmed everything was in order, and we lined up.
We knew engine temperatures were going to be a story on this flight. We just didn’t fully anticipate how much of a story.
The Flight Area
Per my operating limitations and the coordination with Manassas tower, the first flight was conducted inside the Class Delta airspace, one to two miles west of the runway at 1,800 feet MSL, with north and southbound racetrack legs west of the field.
The altitude was a deliberate trade-off. Higher would have been better for cooling airflow and giving me more options in an emergency, but 1,800 feet was the ceiling we could use without stepping into Dulles’s airspace. You work with what you have.
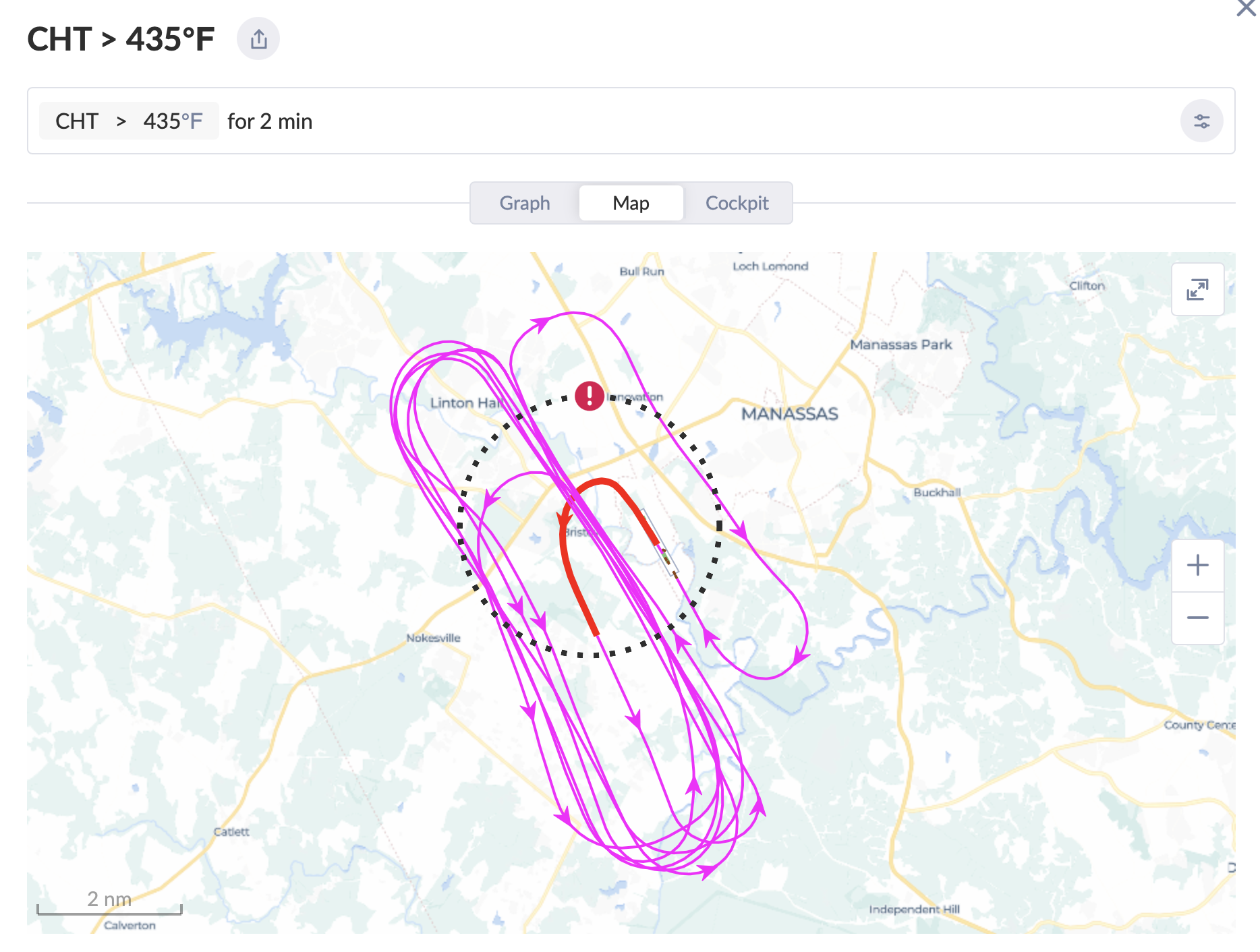
Flight track over Manassas (KHEF). Red segment marks where CHTs exceeded 435°F — concentrated at the departure end of RWY34R.
Takeoff and Climb: The CHTs Tell the Tale
Liftoff from RWY34R was clean. The RV-10 accelerated exactly as I was expecting — consistent with the seven hours of transition training I’d done with Mike Seeger in Vernonia, Oregon before the build was complete. That experience paid off; there were no surprises on the runway and the controls felt immediate and responsive — more on the flight characteristics in a future post. For now, let’s talk about what the engine monitor was screaming at us.
We had configured our warning limits conservatively for the first flight:
Yellow (caution): 400°F CHT
Red (warning): 425°F CHT
Remember, CHTs were already at around 405°F during run-up, before we even started the takeoff roll. The climb loaded the engine further and temperatures rose quickly.
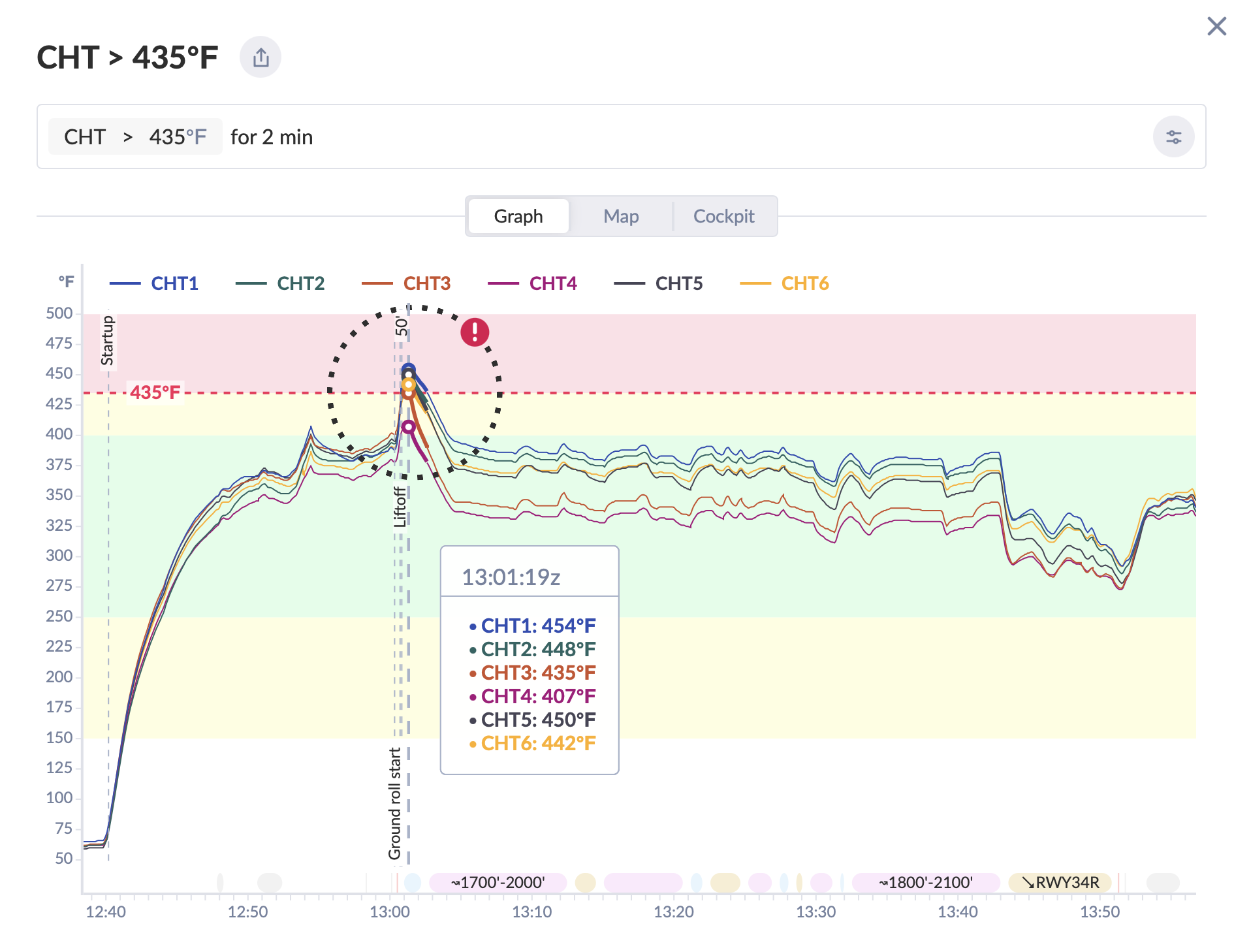
At 13:01:19 UTC — roughly a minute after liftoff — cylinder head temperatures peaked across the board:
Cylinder
Peak CHT
CHT 1
454°F
CHT 2
448°F
CHT 3
435°F
CHT 4
407°F
CHT 5
450°F
CHT 6
442°F
Five of six cylinders exceeded our red warning limit. CHT1 hit 454°F — well into territory that gets your attention. The aircraft’s engine monitor was painting a very pink picture.
All six CHTs during the first flight. Peak at 13:01:19 UTC with CHT1 reaching 454°F. Temperatures were above 435°F for approximately 2 minutes before trending down.
The good news: we had expected elevated temperatures during break-in, had briefed the scenario, and had a plan. We maintained climb power, kept the nose slightly lower than we might otherwise to maximise airflow, and watched the numbers. Within about two minutes, CHTs began their descent back toward normal operating range and continued to trend down through the rest of the flight as the engine settled in.
Not everything was alarming, though. Oil temperature and oil pressure both told a completely different story — and a reassuring one.
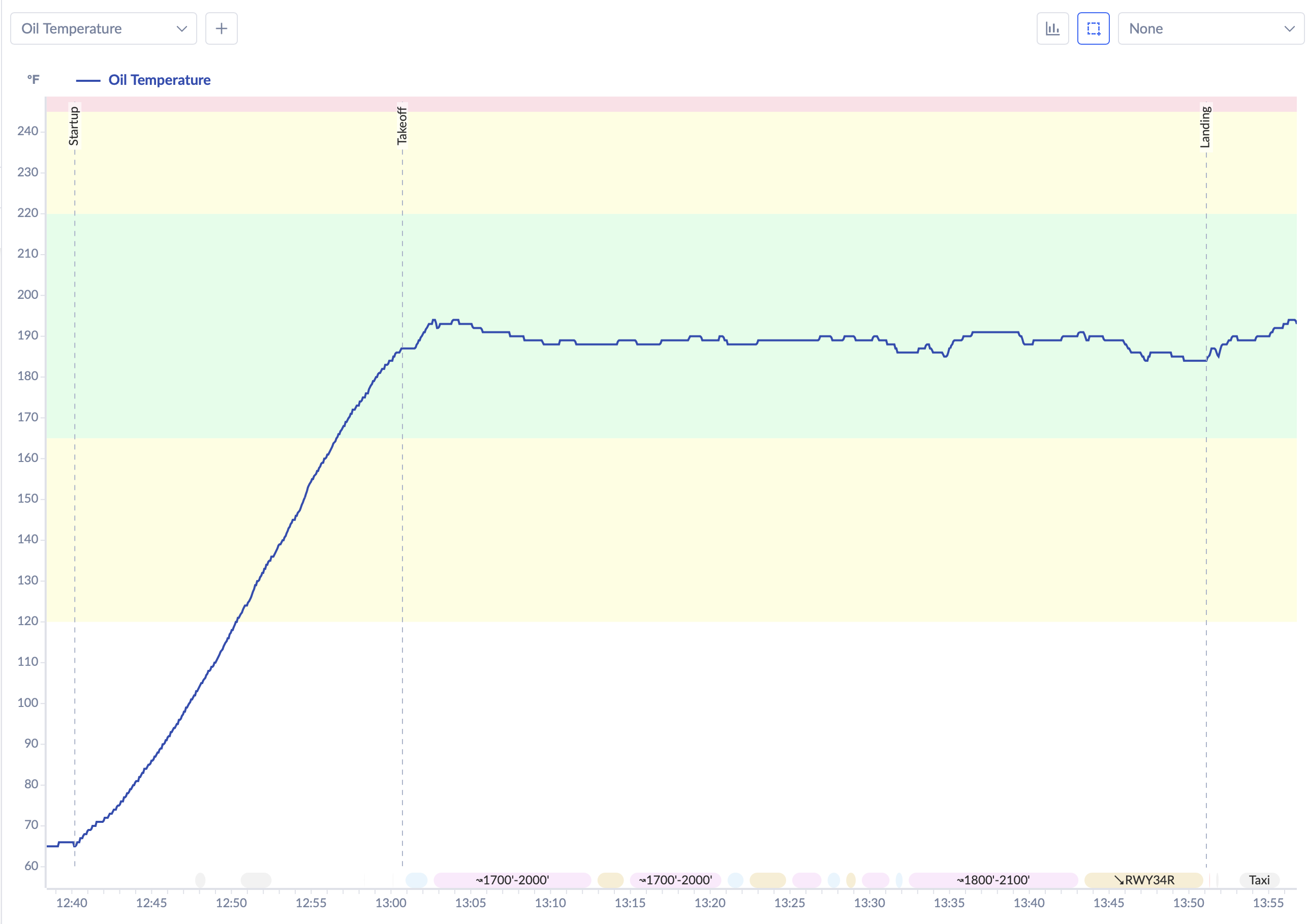
Oil temperature started around 65°F at engine start, climbed steadily through the long taxi, reached roughly 185–190°F by the time we lifted off, peaked at around 195°F shortly after takeoff, then settled into a rock-solid band of 185–195°F for the entire flight — squarely in the green, never threatening the yellow or red zones. Whatever the CHTs were doing, the oil temperature was happy throughout.
Oil temperature throughout the flight. Climbed steadily during taxi, peaked at ~195°F shortly after takeoff, then held a stable 185–195°F band for the duration — solidly in the green zone throughout.
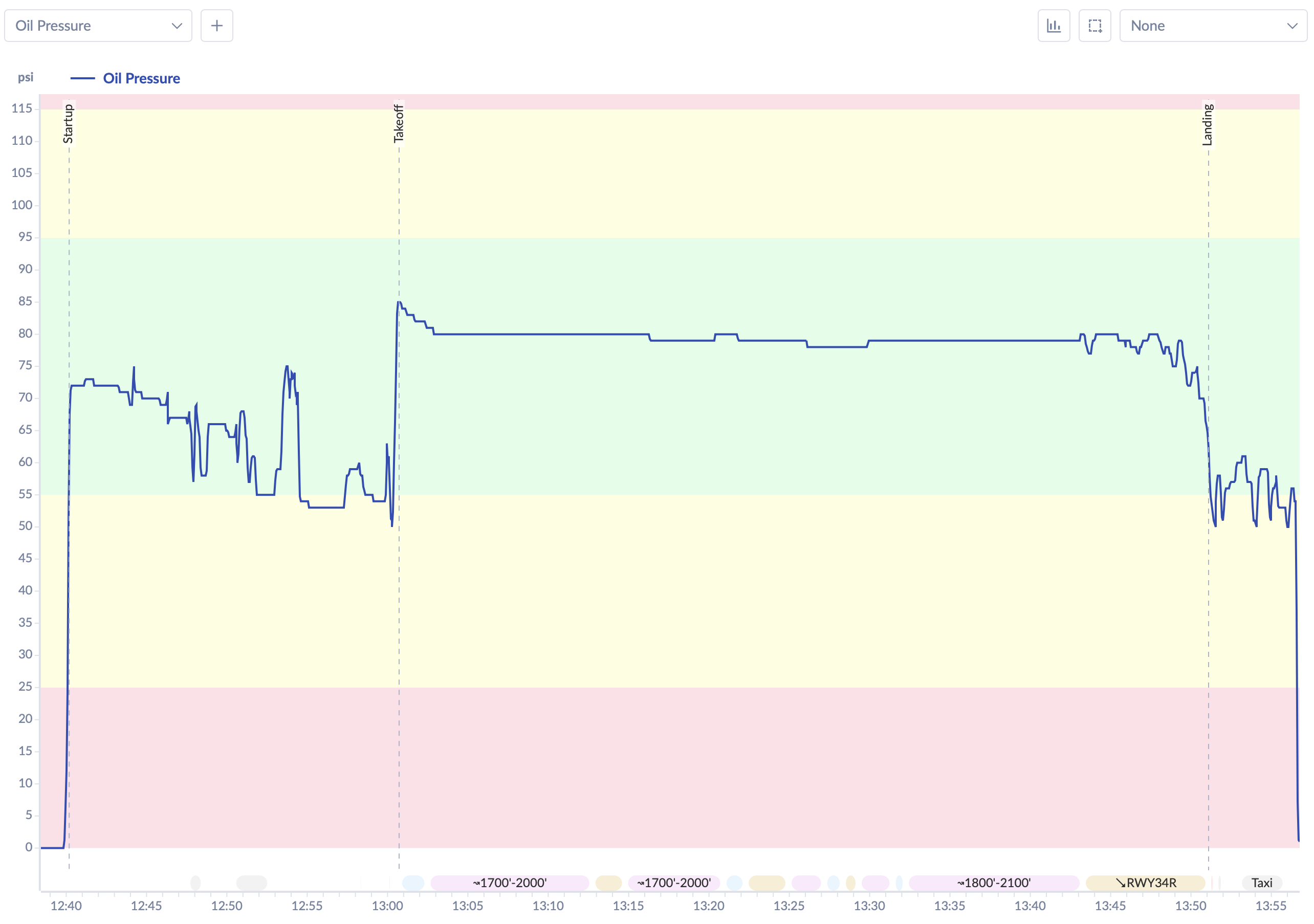
Oil pressure was equally well-behaved. It jumped to around 70 psi immediately at startup, showed some normal variability during taxi at idle power, then spiked cleanly to ~85 psi as full power was applied for takeoff. From there it held a steady ~80 psi through the entire flight — solidly in the green band — before settling back down during the taxi in after landing. On a brand new engine, seeing oil pressure that stable and consistent is exactly what you want.
Oil pressure throughout the flight. A brief spike to ~85 psi at full-power takeoff, then a steady ~80 psi through the pattern — well within the green band for the entire flight.
The flight track map tells the same story geographically — you can see the red segment (CHT > 435°F) concentrated right over the departure end of the runway, fading as we worked through our planned pattern to the southwest of the airport.
One other thing you’ll notice if you watch the cockpit video: the primary flight display — connected to Attitude and Heading Reference System number one (AHRS-1) — tumbled during the takeoff roll. Importantly, this was isolated to screen one. Primary flight display two, connected to AHRS-2, remained solid throughout, as did the G5 standby attitude indicator. So while the artificial horizon on screen one was misbehaving, we had two other reliable attitude references in the cockpit the entire time. The image below captures it clearly — PFD1 on the left showing a wildly incorrect attitude while PFD2 on the right remained perfectly stable.
PFD1 (left, circled) showing a tumbled attitude during the takeoff roll. PFD2 (right, circled) and the G5 standby both remained solid throughout.
Notably, AHRS-1 corrected itself shortly after takeoff — before we even reached the first turn — so the tumble was brief. That said, “it fixed itself” isn’t a satisfying answer for a system you’re counting on, and it’s not ideal, absolutely something that needs to be resolved before any IFR or night flight. It’s sitting lower on the priority list right now while we focus on the engine temperatures. One squawk at a time.
The Builder’s Conundrum: Run It Hard vs. Take It Easy
Here’s the tension nobody talks about enough.
A brand new Lycoming needs to be run like you stole it. Full power, or as close to it as you can manage, for as long as it takes to get the rings to seat against the cylinder walls. We’re talking an hour or two of hard running — sustained high power, letting the pressure in the combustion chamber do the work of pushing those rings out and wearing them in. The payoff is a marked drop in cylinder head temperatures on subsequent flights as the seal improves and the engine breathes properly. You watch for that drop like a hawk.
But running an engine flat-out is exactly at odds with what you want to do with a brand-new airframe. Every builder’s instinct — and the right instinct — is to build up slowly. Fly a little conservatively at first. Take things one step at a time. Get familiar with the aircraft before you start pressing limits.
Those two requirements don’t coexist gracefully.
This isn’t our first rodeo — we previously built and flew an RV-7A (N997RV), and we had elevated cylinder head temperatures on the first several flights of that aircraft too. That experience helps. You know the temperatures are coming, you’ve seen the trend lines before, and you have some confidence that the numbers will fall as the engine breaks in. But it doesn’t make the decision any easier when you’re staring at 454°F on CHT1 and trying to decide how hard to push a machine you’ve spent years building.
What We Learned
A few takeaways that might help others approaching their own first flight:
1. Brief the temperature scenario in advance. We had talked through “what do we do if CHTs spike” before we ever started the engine that morning. That meant when the warnings lit up, there was no panic — just a pre-briefed response.
2. Watch your pre-takeoff temps carefully. The long taxi and run-up had already pushed CHTs to ~405°F before we ever lifted off. That warm baseline mattered. If temperatures had continued to climb during run-up, I would have aborted and tried again later in the day. Knowing your limits — and sticking to them — is the whole game.
3. Keep the new engine ground running time to a minimum — get it flying at high power quickly. The elevated temps during climb are part of that process — uncomfortable to watch, but expected.
4. Coordinate your airspace early. The 6:30 AM tower call was one of the better decisions of the morning. Having the flight area locked in before we even went through the walkaround meant one less variable to manage when we were ready to fly.
5. Set your limits to inform, not alarm. Our conservative warning thresholds (400°F yellow, 425°F red) meant we were informed early. Some builders set limits higher to avoid nuisance alerts; I’d argue starting conservatively and adjusting based on data is the better approach.
6. Have the fire department on standby and mean it. Not as a formality. Talk to them beforehand, make sure they know the aircraft and where you’ll be operating. They were professional, prepared, and I hope we never need them — but knowing they were there made a difference. We also brought them donuts as a bribe, which we highly recommend as part of any first flight preflight checklist.
What’s Next
The RV-10 is now officially a flying machine. Phase 1 flight testing has begun, and there’s a lot of data to collect and share. Future posts will cover:
Flight handling and control harmony
Engine break-in progress and CHT trends over the first 25 hours
Performance numbers vs. the Van’s specs
Lessons learned from the build that showed up on the flight line
If you’re building an RV-10 (or any experimental), I’d love to hear from you. Drop a comment below or reach out directly — the EAA community is one of the best parts of this whole journey.