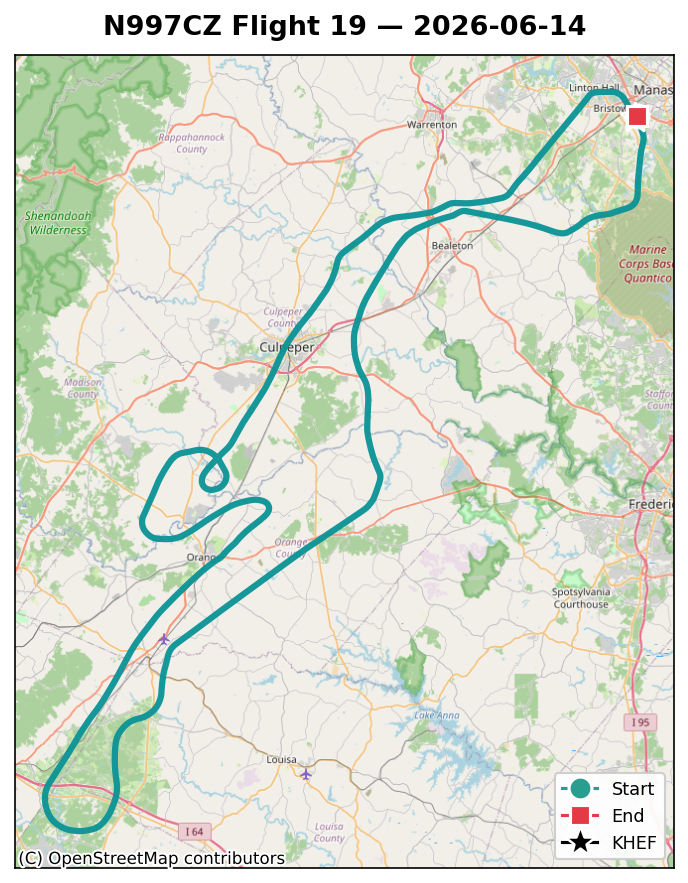
Flight 19 put Harry Tsepelias back in the left seat for another go in N997CZ. It wasn’t a formal test card — more of a shakedown and stick time — but it gave the autopilot a long, honest workout, and that finally pinned down a roll-autopilot squawk we’ve been chasing: it just wasn’t aggressive enough rolling into turns. The good news is everything else on the airplane behaved beautifully.
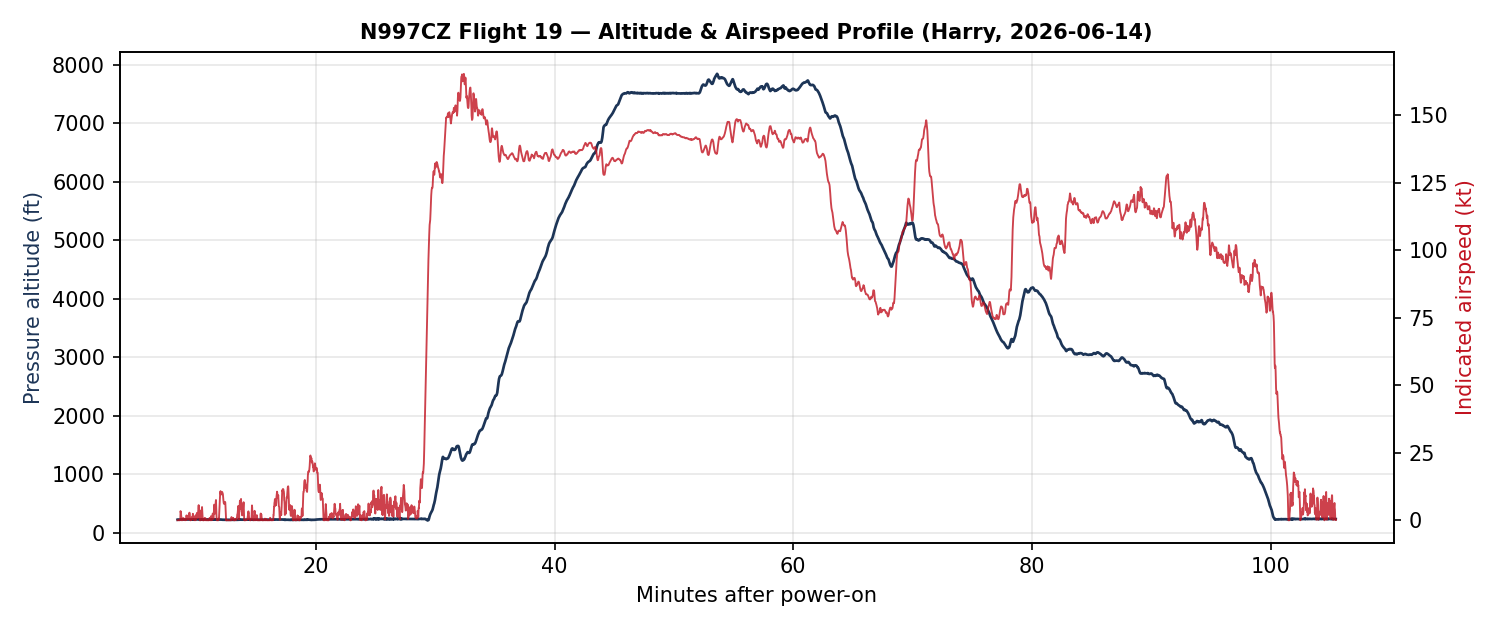
A quick snapshot of the flight: engine start 09:42, shutdown 11:19 — about 1.6 hours — out of KHEF, up to 7,830 ft MSL (8,238 ft GPS), 165 KIAS / 172 kt true at the fast end, 18.6 gallons burned (all from the right tank, no switch).
The autopilot is slow to roll into a turn
The squawk is easy to feel from the seat: dial in a big heading change with the heading bug, and the flight director snaps to a commanded bank — but the airplane is slow to roll into it, as if the servo can’t push the ailerons over. I’d been chasing it for a few flights mostly by adding muscle, walking the roll-servo maximum torque up 15% → ~40% → 90%. It helped, but never quite cured it. So I went digging in the logs to settle the real question: is the autopilot short on muscle, or just using it badly?
One other autopilot note worth logging: during a slower segment the system briefly went to its “minimum airspeed” protection (it annunciated for about 38 seconds, along with nose-up trim commands). That’s the autopilot refusing to fly slower than its configured floor — and it’s exactly why lowering that minimum-airspeed setting is on the to-do list, so the AP can fly the slower approaches we want for upcoming testing.
Following the thread: muscle or gain?
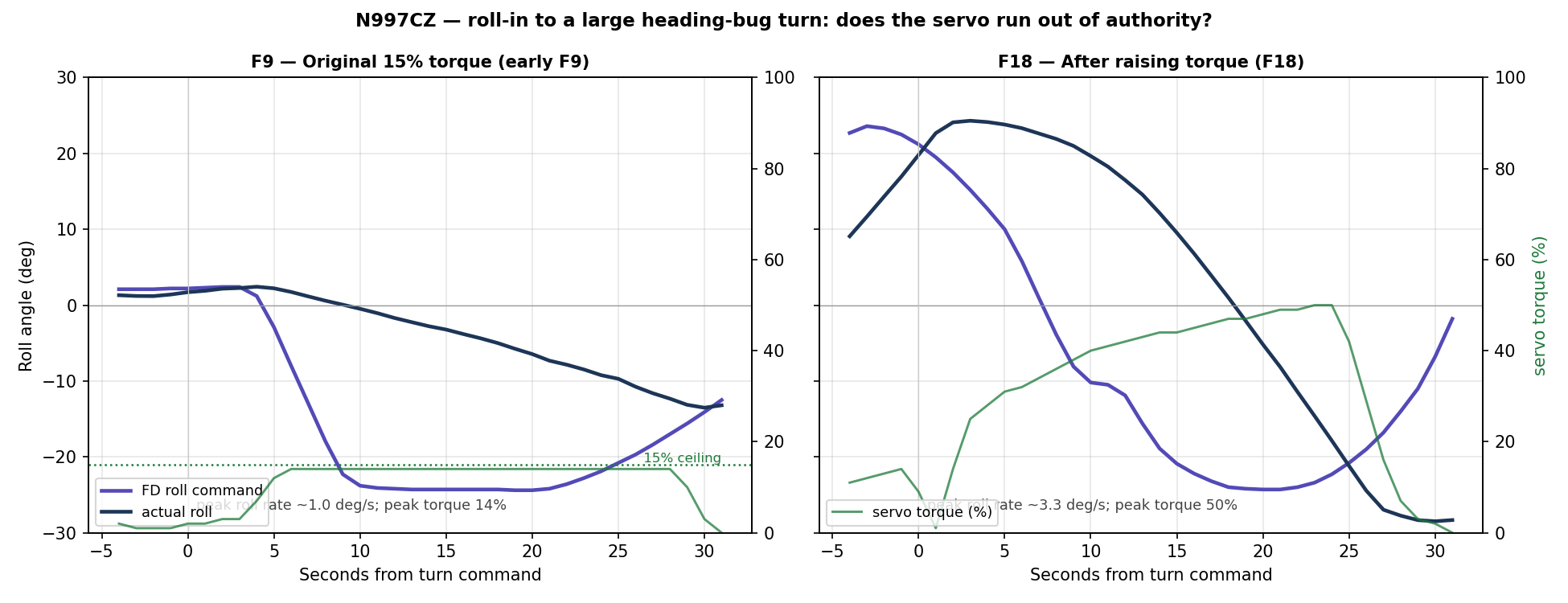
Early on, the sluggishness was real torque starvation. Back on Flight 9 the roll servo’s max torque was set to just 15%, and on a big heading-bug turn the servo pegged that 15% ceiling and the airplane rolled in at about 1° per second — never even reaching the commanded bank. That’s the “no strength to move the ailerons” feeling, and it’s exactly why I kept raising the torque.
Roll-in to a 24° heading-bug turn: at 15% torque (left) the servo pegs its ceiling and the airplane barely rolls; after raising it (right) the airplane follows the command.
Raising the torque fixed the authority problem. But here’s the catch: at the current 90% setting the roll-in is still gentle — and when I pull the numbers, the servo is only using about 20–45% of its torque during those turns. It never gets near 90%. It’s no longer out of muscle; it has plenty in reserve and simply isn’t using it.
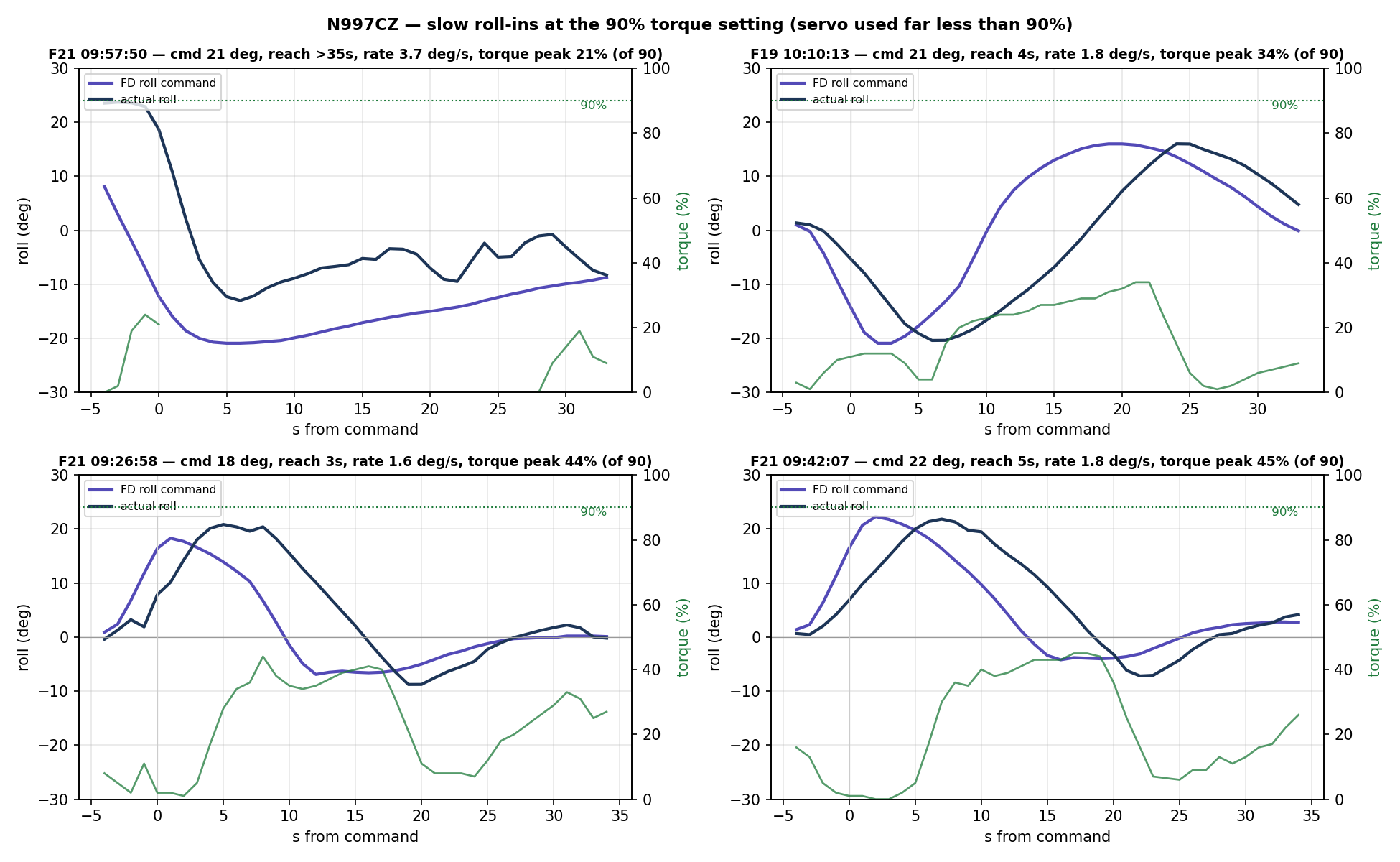
Four heading-bug turns at the 90% torque setting — the airplane (navy) lags the flight director command (purple) into the bank while servo torque (green) stays well below the 90% line.
In each of these four heading-bug turns, the actual roll trails the flight director’s commanded bank by several seconds, rolling in at only ~1–3° per second — and the servo torque sits far below the 90% line the whole time. The autopilot has authority to spare and just isn’t asking for it.
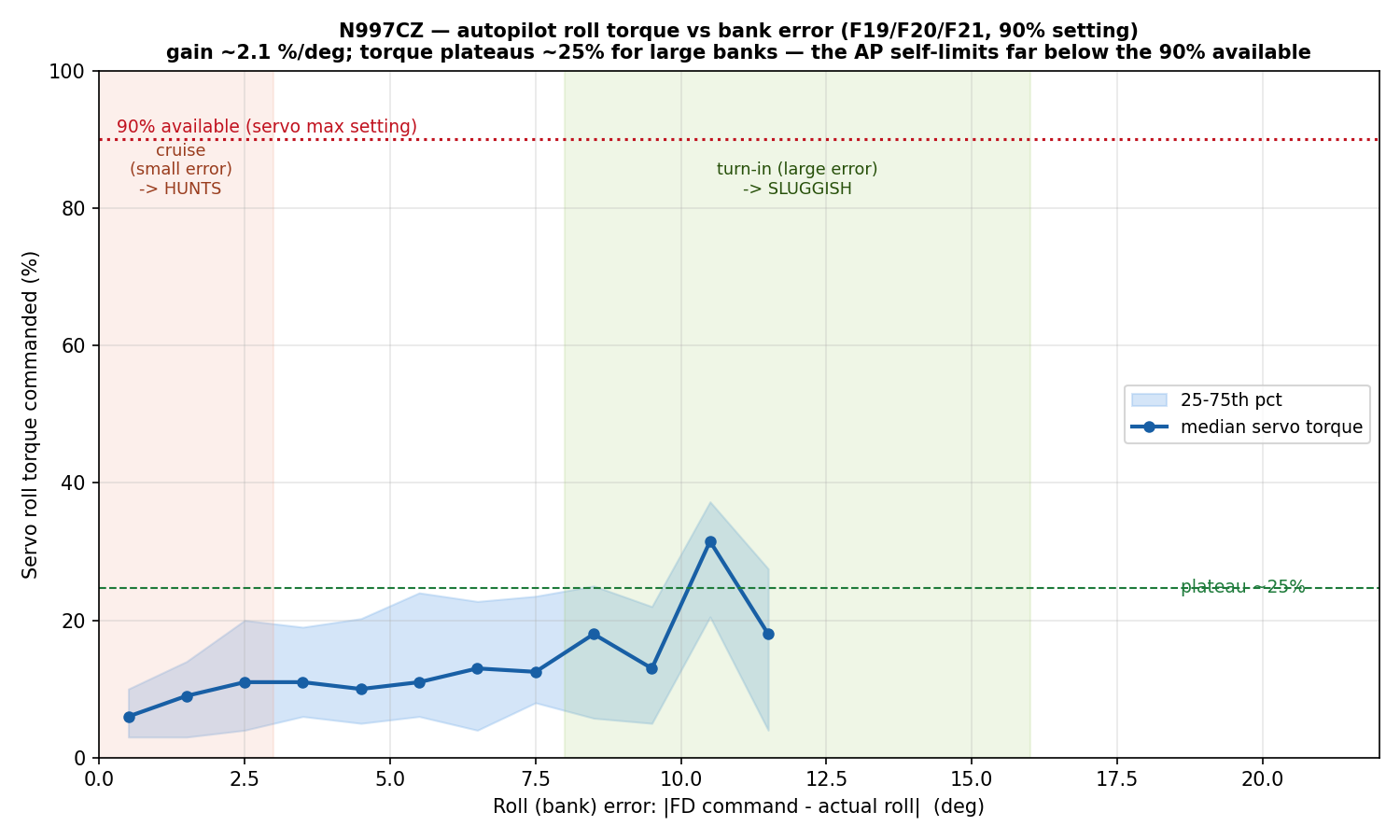
The clincher is the autopilot’s torque-versus-bank-error curve. Pooling every autopilot-flown turn on the recent flights, the servo commands only about 2% torque for every degree the airplane is off the commanded bank, and it plateaus around 25% even when the wing is more than 10° from where it should be:
Servo torque vs bank error — the gain is only ~2%/deg and torque plateaus near 25% of the 90% available.
That’s the signature of a roll gain set too low — the autopilot is under-driving a servo that has torque to spare. And Garmin’s roll servo has exactly two knobs: Max Torque (the muscle, which I’d been raising) and Roll Servo Gain — literally “how aggressively the servo moves the ailerons,” adjustable from 0.05 to 10.00. Mine is sitting around 0.6, down near the bottom of the range.
So I’d been turning the wrong knob. The fix for the sluggish turns isn’t more torque, it’s more gain — telling the servo to use the authority it already has. If raising the gain doesn’t crisp up the roll-in, the next suspect is mechanical friction in the aileron circuit, which the Garmin servo can test for with a clutch-slip check.
Everything else: healthy
While I chase the autopilot tuning, the rest of the airplane turned in one of its cleaner data sets:
Engine temps: the hottest cylinder head was Cylinder 5 at 416°F — still the air-dam “canary” that runs warmest in the climb — with Cylinder 4 coolest at 379°F. Everything comfortably under the 450°F redline.
Carbon monoxide: cabin CO peaked at 6 ppm (mean under 1) — benign, and the normal non-zero trace confirms the detector is reading correctly.
Attitude (AHRS): rock-solid. Another flight since Garmin replaced the second AHRS — cross-unit deviations stayed under 400%, with zero of the big >500% spikes from the bad-unit era and roll disagreement never over 2.3°. The roll squawk is an autopilot-tuning issue, not an attitude-sensing one — the AHRS knew exactly where the wing was.
Flight 19 altitude and airspeed profile.Flight 19 ground track (KHEF test area).
Bottom line
Flight 19’s headline is a course correction, not a triumph: I’d been adding torque to a roll autopilot that was actually short on gain. The servo has muscle to spare — it uses only a quarter of what’s available — and just needs to be told to use it. So the next session is about raising the Roll Servo Gain a few steps at a time (Garmin’s in-air method: overpower the autopilot off the commanded bank, release, and watch how crisply it drives back), leaving the torque where it is. Engine, fuel, CO, and the overhauled attitude system all came home clean. Thanks to Harry for the stick time and the careful notes that made this one easy to pin down.
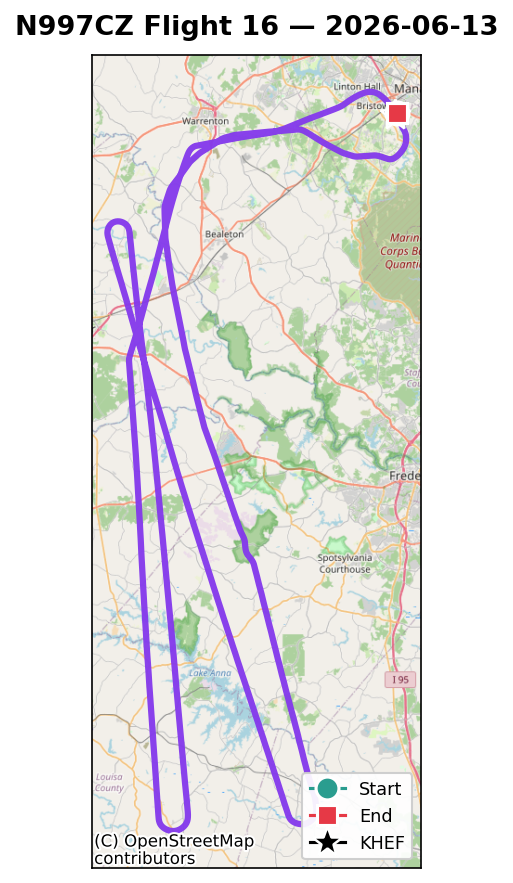
N997CZ’s Flight 16 ground track — long, straight test legs for stabilized cruise points
After the climb sortie, Flight 16 turned to the next block in the Phase 1 deck: cruise performance and leaning. Pick one altitude, hold it dead steady, and step through power and mixture settings, logging speed and fuel flow at each stabilized point. The ground track tells you what that looks like from above — long, patient straight legs instead of the racetracks and sawtooths of the maneuvering flights.
It was also quietly historic for a different reason: this was the first flight with both attitude units overhauled (more on that below).
The Numbers
Date
2026-06-13 (morning)
Engine time
~1.7 hr
Engine hours
22.2 → 23.9
Test altitude
7,500 ft MSL, 2500 RPM (density alt ~8,900 ft)
Max altitude
~7,550 ft MSL (7,905 ft GPS)
Fuel used
22.7 gal (totalizer) — matched the truck receipt (21.70 gal) to ~1 gal
The heart of the flight: hold 7,500 ft and 2500 RPM, then step the throttle down through a range of manifold pressure, letting the airplane stabilize at each setting. The stabilized points (power is the G3X’s own computed engine percentage):
MAP
Power
Fuel flow
TAS
Economy
22.5″
70%
18.7 gph
168 kt
9.0 nm/gal
21.5″
67%
17.6 gph
164 kt
9.3 nm/gal
20.5″
64%
16.8 gph
162 kt
9.6 nm/gal
19.3″
60%
15.9 gph
156 kt
9.8 nm/gal
17.9″
55%
14.5 gph
149 kt
10.3 nm/gal
16.9″
52%
13.7 gph
141 kt
10.3 nm/gal
14.8″
46%
12.3 gph
133 kt
10.8 nm/gal
It’s the classic trade, made concrete: near wide-open (~22.5″, 70% power, 18.7 gph) the airplane trues a brisk 168 knots but returns only 9.0 nm/gal; pull the throttle back toward 15″ (about 46% power) and you give up roughly 35 knots of true airspeed to gain about 20% in fuel economy — up past 10.8 nm/gal. At a fixed mixture, every extra knot of speed costs efficiency: the balance every cross-country pilot strikes.
Two caveats before anyone quotes these figures. This is not the airplane’s top speed. Every point was flown at a fixed 2,500 RPM — not the 2,700 the engine turns at full power — and at 7,500 ft with the mixture full rich, so even the 168-knot top row is leaving speed on the table compared to full throttle, full RPM, and a more efficient altitude. This is a controlled comparison, not a speed record. And it is not best economy. Full rich is the thirstiest way to make any given power; the real fuel savings come from leaning, which is exactly what the next card went after. Read the table for the shape of the power-speed-fuel trade at one condition, all else held equal — not for the best the airplane can do at either end.
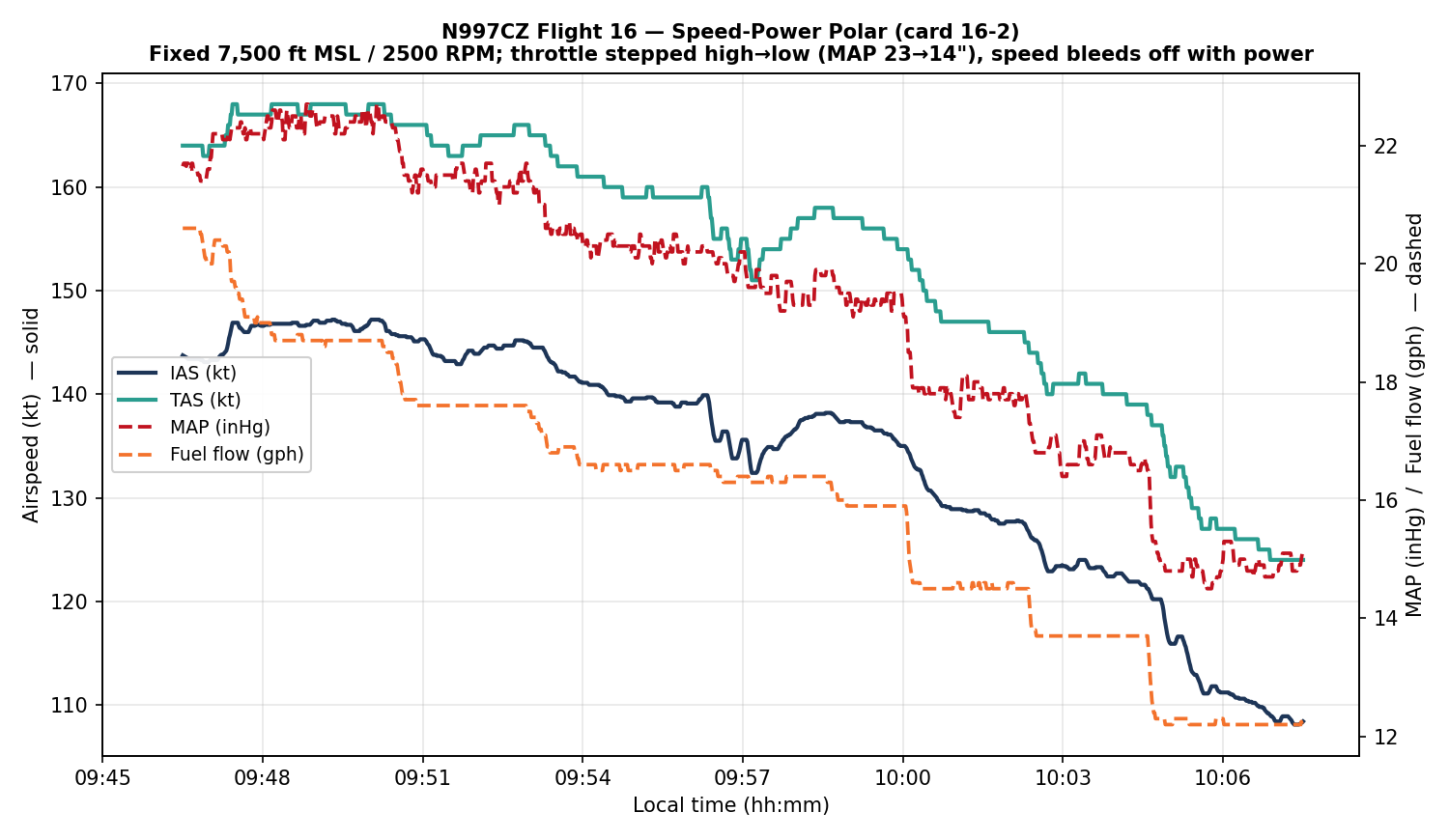
Here’s the whole sequence as flown — throttle stepped down in stages at a fixed altitude, with the airspeed settling out at each new power setting:
Flight 16 speed-power polar — MAP and fuel flow (dashed, right axis) stepped down while IAS and TAS (solid, left axis) bleed off
The Lean Sweep (GAMI Spread)
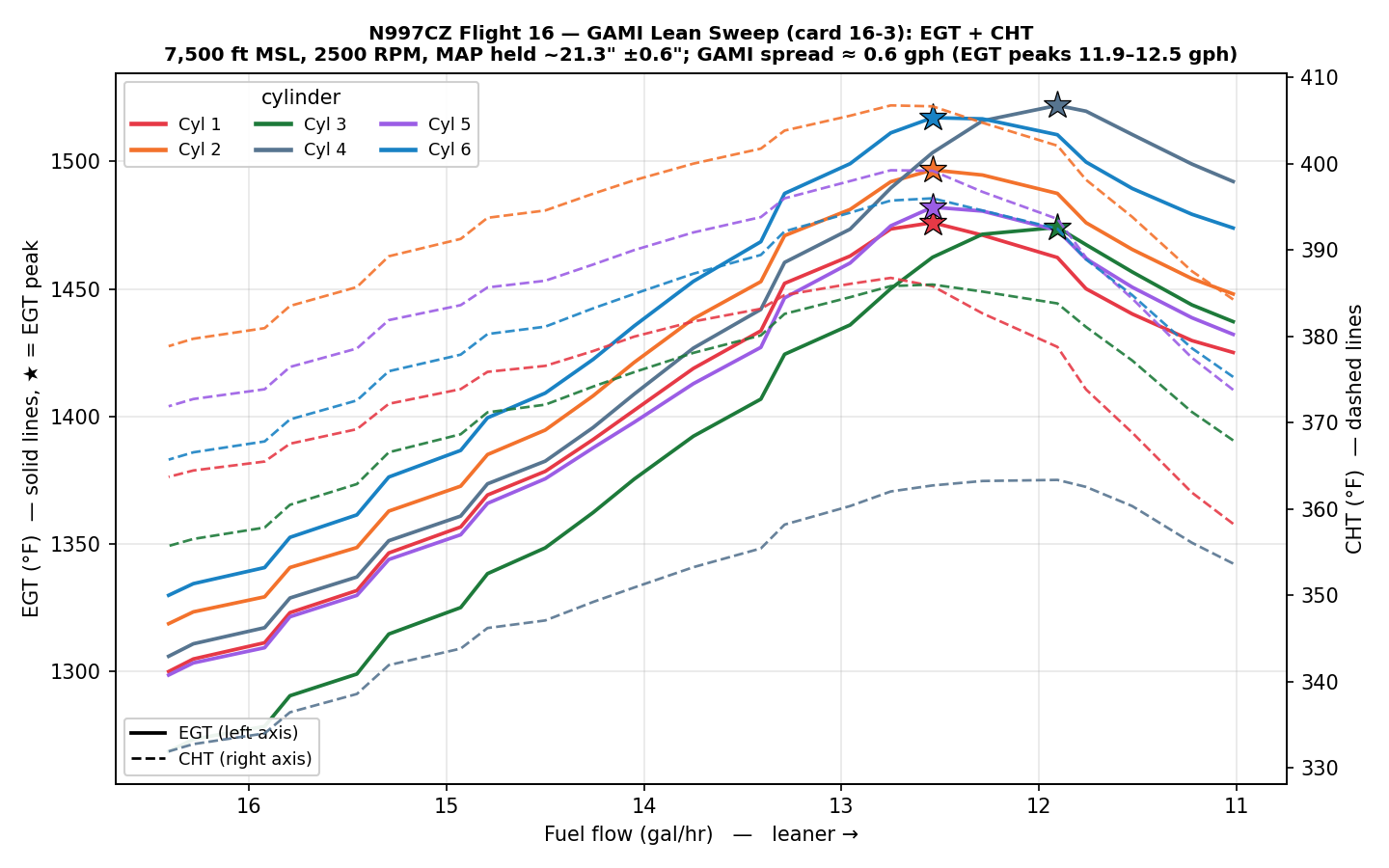
Then the part I’d been looking forward to: card 16-3, the mixture sweep. Hold the airplane at 7,500 ft and 2500 RPM, leave the throttle alone (manifold pressure parked at ~21.3″, wandering maybe ¾ of an inch), and pull the mixture back slowly — about 16 down to 11 gph — while the G3X logs all six cylinders’ exhaust gas temperatures. Each cylinder’s EGT climbs to a peak and then falls; the fuel flow at which it peaks tells you how rich or lean that cylinder runs relative to the others. The spread between the first and last cylinder to peak is the GAMI spread — the headline number for how well your fuel injectors are matched.
Flight 16 GAMI lean sweep — six EGTs (solid, left axis) rise, peak (★), and fall; CHTs (dashed, right axis) overlaid. GAMI spread ~0.6 gph
The result is a good one: a GAMI spread of about 0.6 gph. Cylinders 1, 2, 5, and 6 peak first (around 12.5 gph — they run slightly leaner), and Cylinders 3 and 4 peak last (around 11.9 gph — slightly richer). Anything under ~1 gph is generally considered well-matched and capable of smooth lean-of-peak operation, so this engine’s injectors are in good shape right out of the box.
The dashed lines on the chart are the cylinder head temperatures (right axis), and they tell their own reassuring story. As expected, each CHT peaks just slightly rich of its EGT peak, and the hottest any head got during the entire sweep was about 407 °F (Cylinder 2) — comfortably below limits the whole time, even at the richest, highest-EGT settings. Leaning this engine doesn’t cook it. (One honest note on method: the curves are read straight off the logged data; with a conventional left mag and the SDS electronic ignition on the right, the absolute EGT picture carries that timing asymmetry, but the relative peak ordering — which is what the spread measures — is robust.)
And here’s the bonus the sweep makes vivid: leaning buys efficiency far more cheaply than throttling back does. Hold the same ~21″ of manifold pressure the polar started at, and instead of closing the throttle, just lean the mixture — the airplane still trues about 163 knots on 13.3 gph, a tidy 12.3 nm/gal (and leaner still, up to ~14 nm/gal). Back on the speed-power polar it took ~18.7 gph of throttle to make that same ~163 knots, at just 9.0 nm/gal. Same speed, roughly a third less fuel. That’s the whole point of leaning, made concrete.
Here’s the sweep in the same form as the polar table above — but watch the Power column, because that’s the whole story. On the polar, economy only improved as power (and speed) came down. Here power holds at ~65% the entire time; leaning alone buys the efficiency, and the speed barely moves until the very lean end:
Fuel flow
Power
TAS
Economy
16.0 gph
64%
162 kt
10.2 nm/gal
15.0 gph
66%
163 kt
11.0 nm/gal
14.0 gph
66%
163 kt
11.6 nm/gal
13.3 gph
66%
163 kt
12.3 nm/gal
12.5 gph
65%
161 kt
13.0 nm/gal
11.5 gph
66%
157 kt
13.7 nm/gal
11.0 gph
65%
155 kt
14.0 nm/gal
(All held at ~21″ MAP and 7,500 ft — the same condition as the GAMI sweep above.)
Cooling and CO
Nothing dramatic, which is the goal in cruise. CHTs stayed comfortable — Cylinder 5 the hottest at 421 °F, everyone else lower, all well under limits. Cabin CO read essentially zero the whole flight. That’s roughly what you’d expect from a stabilized cruise with no sustained slow flight — this airplane’s CO ingress shows up in high-angle-of-attack work, which wasn’t on today’s card — but a flat zero earns an eyebrow rather than a victory lap: Flight 13 also read zero, yet the same detector logged a normal small reading on Flight 17 later the same day. Whether F16’s zero is genuinely clean air or a detector that simply wasn’t reading is still on the verify list.
Three Healthy Horizons
Here’s the quiet milestone. The overhauled second attitude unit (AHRS #2) was installed before this flight, so Flight 16 is the first time N997CZ has flown with both ADAHRS units overhauled. The verification was clean: through the whole flight, from takeoff roll to landing, the two units disagreed by less than a degree in roll, there were no re-aligns, and — for the first time in a long time — zero attitude or heading miscompare annunciations. After a long-running saga, the airplane finally has three attitude opinions that all agree. The full story is in the AHRS post.
After Shutdown
Two panel photos from the ramp after the flight — documentation of the final engine state, not in-flight readings:
G3X engine page after shutdown — the sortie’s fuel used and economy at a glanceG3X engine temperature page after shutdown — all six CHTs and EGTs, cooled down
Bottom Line
A clean set of cruise numbers (12+ nm/gal on the table), a tight ~0.6 gph GAMI spread that says the injectors are well-matched, cooling with margin to spare, and a verified-healthy attitude system. A productive morning’s worth of test cards. Next: the rest of the systems and performance cards.
If you’ve been following along since the early flights, you know this airplane has had a recurring character in its story: the tumbling artificial horizon. ATTITUDE and HEADING MISCOMPARE annunciations, deviation numbers pegged at their limits, an attitude display that would occasionally roll over and play dead during the takeoff roll or hard maneuvering. This is the post where that story gets its arc — how we isolated the problem with flight data, convinced Garmin to overhaul one attitude unit, proved the fix, and then used the same data to convince them about the second unit.
The Setup
N997CZ carries three independent attitude sources: two Garmin GSU 25C ADAHRS units (AHRS #1 and #2) behind the panel, and a G5 electronic standby. Three opinions about which way is up, continuously cross-compared — when they disagree, the system annunciates a miscompare and the pilot gets to wonder which box to believe.
From the first flights, the disagreements clustered in the high-vibration, high-acceleration regimes: the takeoff roll above all, plus stalls and slow flight. Two suspects emerged early: vibration (the prop was genuinely out of balance), and the attitude units themselves.
Fix One: Balance the Prop
The dynamic prop balance took vibration from 0.57 IPS down to 0.01 — a 50-fold reduction — and it helped every attitude source. Looking only at the big deviation excursions (reported deviation above 200%, takeoff roll through touchdown), all three sources improved markedly after the balance.
But it didn’t eliminate the problem. The large excursions kept coming, and they kept coming disproportionately from one box.
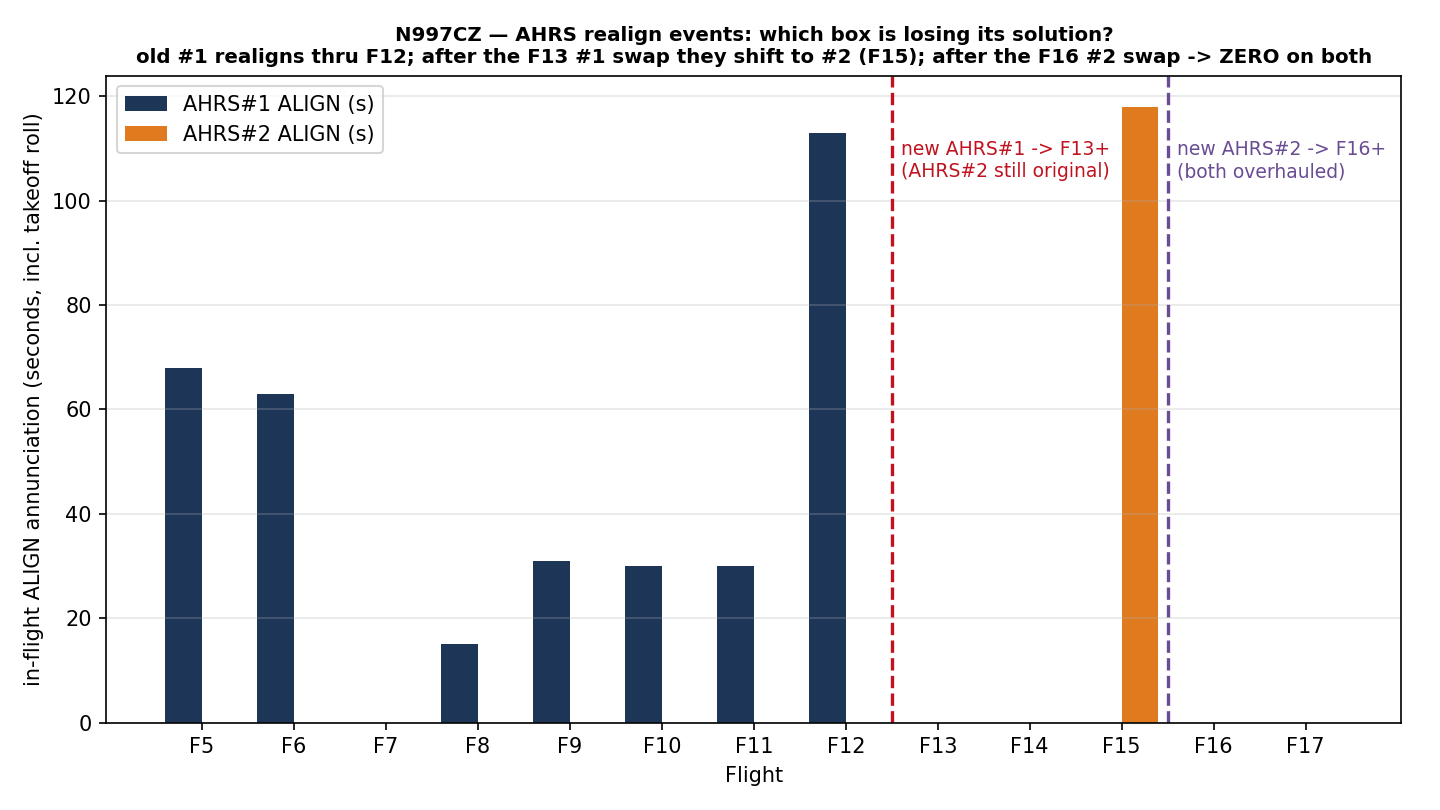
ADAHRS deviation by era — the worst unit flips from AHRS #1 to AHRS #2 at the swap
That’s the chart that tells the whole story, so let’s read it. Each group is an era: (A) original prop, original AHRS #1; (B) balanced prop, original AHRS #1; (C) balanced prop, new AHRS #1 with original #2; (D) both units overhauled — but we’re getting ahead of the story. The prop balance (A→B) drops everyone. But within every era, somebody is the outlier — and in eras A and B, it’s AHRS #1. Not just on average: AHRS #1 was the highest-deviation source on every single flight from 5 through 12. On Flight 12 it saved its best for last — in-flight re-aligns totaling almost two minutes, and a cross-source roll disagreement of roughly 136°.
Fix Two: Replace AHRS #1
Garmin agreed to overhaul AHRS #1, and the replacement unit went into the panel on June 6 — the same day as Flight 12’s fireworks. The before/after is about as clean as flight test data gets:
In-flight re-align events (“AHRS1 ALIGN”): 350 seconds total across Flights 5–12 → zero on Flights 13, 14, and 15.
Maximum cross-source roll disagreement: ~136° → under 10°.
Extreme deviation excursions (>500%): eliminated.
Attitude-horizon tumbles: Flight 13 was the first flight in the airplane’s life without one, and there hasn’t been one since.
Case closed on AHRS #1. Which is exactly what made the remaining data interesting.
The Plot Twist: The Baton Pass
Look at era C in the chart above. With the new AHRS #1 installed, the outlier didn’t disappear — it moved. AHRS #2, the original, never-serviced sister unit, became the highest-deviation source on every flight 13 through 15. The worst-of-three title passed from #1 to #2 on the exact flight the new unit went in.
In-flight ADAHRS re-align events per flight — after the swap, the re-aligns shift to AHRS #2
Then Flight 15 produced the smoking gun. AHRS #2 — which had never logged an in-flight re-align in the airplane’s entire history — dropped its attitude solution and re-aligned for a cumulative 118 seconds, with the system annunciating “USING AHRS1” while the brand-new #1 carried the load. The roles from Flight 12 had exactly reversed.
Better still, from a diagnostic standpoint: the failure is reproducible on demand. It triggers in high angle-of-attack, full-power slow climbs — on Flight 15 it recurred in roughly eight separate events inside a single 30-minute window of climb-performance testing, all at a median of about 89 knots, nose up, full power. A fault you can demonstrate on command is a fault nobody has to take your word for.
Convincing Garmin, Round Two
All of the above went into a short data report to Garmin — the era comparison, the re-align timeline, the reproducibility recipe — with a simple argument: AHRS #2 now exhibits the same in-flight signature AHRS #1 exhibited before its overhaul fixed it; we respectfully request the same service. The analysis we sent Garmin — since updated with the post-replacement verification data — is here, for anyone fighting a similar battle: N997CZ GSU 25C ADAHRS Deviation Analysis (PDF).
Garmin agreed. The replacement AHRS #2 is in hand.
Fix Three: Replace AHRS #2 — and the Verification
Garmin’s overhauled AHRS #2 went into the panel after Flight 15. *Flights 16 and 17 (June 13) are the first this airplane has ever flown with both attitude units overhauled* — the verification flights I’d been waiting to write about.
The data did for #2 exactly what it did for #1. Measuring only the part of each flight that counts — from the start of the takeoff roll through touchdown, with the power-on/alignment window excluded — here is the before-and-after:
ATTITUDE / HEADING MISCOMPARE annunciation time: Flight 15 logged 346 seconds of attitude miscompare and 209 seconds of heading miscompare. Flights 16 and 17 each logged zero of both. These are the very annunciations that had survived the AHRS #1 overhaul — because #2 was still arguing — and they’re simply gone now.
AHRS #2 in-flight re-aligns: 118 seconds on Flight 15 → zero on Flights 16 and 17, with no “USING AHRS1” reversion. AHRS #1 stays at zero too. Both boxes now hold their solution from brake release to rollout.
Maximum cross-source roll disagreement: 0.8° on Flight 16, 3.0° on Flight 17 — against the ~136° this airplane once produced on Flight 12. No deviation tumbles on either unit.
That’s the whole arc closed. Look back at the re-align chart: the navy bars (AHRS #1) end at Flight 12, the lone orange bar (AHRS #2) stands on Flight 15, and after the second overhaul goes in at Flight 16 — nothing. Three healthy attitude opinions, for the first time in this airplane’s life.
Where It Stands
The two original cores — the unit that started it all (S/N 5Q2001016) and its sister (5Q2002262) — go back to Garmin per their return instructions, and that closes the books. Two RMAs, two overhauled units, and a flight-data trail that called the shot both times before the wrench ever came out.
The villain is retired. Onward to the rest of the Phase 1 card deck.
— with thanks to Garmin support for engaging with the data all the way through.
After the ADAHRS vibration analysis across the first five flights, Garmin’s guidance was unambiguous: fix the CAN bus first, then work the vibration problem. The data showed sustained % deviation throughout every flight — but some of those readings may have been contaminated by CAN bus dropouts rather than pure vibration. You can’t separate the two until the bus is clean.
So before touching the prop balance or the ADAHRS mounts, we pulled the old harness and rewired the entire CAN bus from scratch with the correct 120Ω controlled-impedance spec wire.
Why does this matter? Garmin specifies a maximum CAN bus length of 20 meters (66 feet) using controlled-impedance twisted pair wire. The original N997CZ installation used standard shielded twisted pair — not the specified 120Ω wire — and measured approximately 96.5 feet total. Both the wrong wire and the excessive length can cause impedance mismatches, signal reflections, and the kind of intermittent dropouts Garmin’s tech support confirmed in Flights 1–3.
Before and After: Every Node on the Bus
The CAN bus in N997CZ runs as a daisy chain from the PFD1 terminator through thirteen avionics boxes to the roll servo terminator at the far end. The measurements below are the wire lengths between adjacent nodes — not the lengths attributable to any single box.
Node
Was
New length
PFD1
TERM
│ │
63"
28"
G5
Sockets
│ │
55"
20"
ADAHRS #1
Sockets
│ │
34"
15"
ADAHRS #2
Sockets
│ │
83"
20"
EIS
Sockets
│ │
89"
28"
Audio panel
3-row pin
│ │
86"
28"
GMC507 autopilot
3-row pin
│ │
84"
28"
GAD27
Sockets
│ │
71"
37"
MFD
Sockets
│ │
73"
36"
PFD2
Sockets
│ │
75"
35"
COM2 (GTR20)
Sockets
│ │
32"
28"
GAD29 ARINC
Sockets
│ │
193"
181"
Pitch servo
│ │
220"
208"
Roll servo
TERM
Total
1,158" / 96.5 ft
692" / 57.7 ft
Wire lengths in inches between adjacent CAN bus nodes. New length = larger of wire-only vs. shield & pin measurement. Garmin max: 792" / 66 ft.
96.5 ft
Old total
57.7 ft
New total
−38.8 ft
Saved
66 ft
Garmin max
The new harness comes in at 57.7 ft — comfortably under Garmin’s 66 ft maximum. The old harness was 30.5 ft over spec.
What’s Next
With the CAN bus now on spec wire and properly sized, the next flights will establish a clean baseline. If the % deviation drops significantly, that confirms the old wiring was a major contributor. Whatever remains after that points squarely at vibration — and the prop balance, SB 2144 GSU assessment, and mount evaluation are queued up to address it.
If you’ve been following the N997CZ build journal, you know the first five flights have been a mix of exhilarating milestones and humbling detective work. Flight 1 was a dream. Flight 2 sent me home early with erratic oil temperature gauges. Flight 3 gave me two solid hours and flaps for the first time. Flight 4 found an alternator belt slipping. But threaded through all of them was something I kept noticing and not fully understanding: in every single flight, the PFD #1 artificial horizon has tumbled upside down at least once.
That’s not a nuisance — that’s a serious ADAHRS event. Once I started pulling the deviation data from all five flights and laying them side by side, the pattern became impossible to ignore. I posted the data to the Van’s Air Force build thread and the community response was immediate, deep, and directly useful. This post is about what the data shows, what the community has experienced, what Garmin tech support confirmed, and my current working theory: this is primarily a vibration problem — with CAN bus wiring issues thrown in as a secondary layer.
What Does “ADAHRS % Deviation” Actually Mean?
N997CZ actually carries three ADAHRS units, all integrated into the G3X system. The G3X Pilot’s Guide confirms that the G3X supports up to three ADAHRS sources, with the G5 functioning as a full participant in the cross-comparison and miscompare monitoring via CAN bus — not a standalone backup, but a third integrated ADAHRS. The G3X uses two GSU 25C units — ADAHRS #1 and ADAHRS #2 — plus the Garmin G5, all cross-checked against each other. Both GSU 25Cs are mounted on the sub-panel directly forward of PFD #1. The G5 sits in a separate location, which makes its deviation data a valuable third data point — if its profile looks different from the GSU 25s, it helps localize where the disturbance is worst. That data is being pulled and will be added in a follow-up.
Before diving into the charts, an honest caveat: Garmin has not publicly disclosed what % deviation actually measures internally. We asked. They didn’t specify. So everything below is interpreted with that uncertainty in mind. It could be a cross-check residual between the two GSU 25 units, or something internal to each unit — perhaps related to Kalman filter covariance, or how much raw IMU data agrees with the filter’s predicted state. Without Garmin’s definition, we can’t be certain.
Working assumption: % deviation is a proxy for disturbance severity — higher is worse, sustained high values indicate a real problem. Garmin tech support declined to specify what maximum acceptable values should be. The 999% hard pegs have not been confirmed as caused by CAN bus dropouts specifically. Garmin’s guidance: fix the CAN bus first, then re-evaluate what remains.
Hypothesis on the 999% spikes: These hard pegs likely occur during takeoff as RPM sweeps upward from idle. The rising forcing frequency sweeps through the natural resonant frequency of the ADAHRS mount — where vibration transmission into the sensor peaks. Once RPM stabilizes at cruise, the deviation drops to an elevated-but-lower baseline. This is consistent with classic mass-spring-damper resonance behavior and with community reports of problems being RPM- and power-setting-dependent.
Several things can drive this, in rough order of likelihood for a new RV-10: an unbalanced or un-clocked prop; GSU 25 mount resonance amplifying vibration at one sensor location; loose lower cowl hinge pins transmitting vibration into the firewall; and CAN bus dropouts causing the cross-check math to fail and peg at 999%.
Five Flights of Data
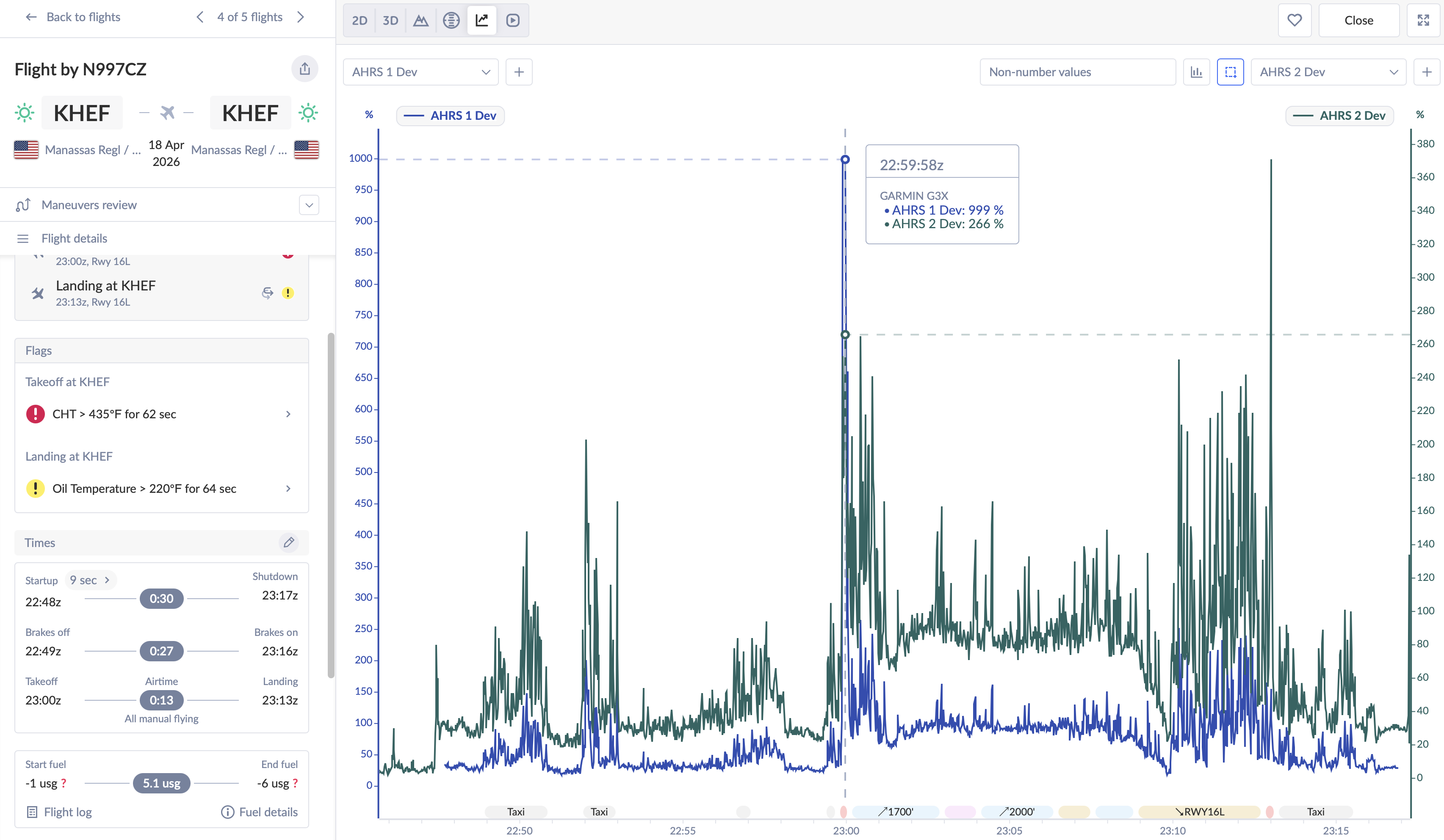
Blue = ADAHRS #1 | Teal/green = ADAHRS #2. A flat, quiet trace near zero is healthy. What you’ll see instead is large % deviation in both sensors from takeoff to touchdown across all five flights — sustained throughout every flight, not isolated spikes.
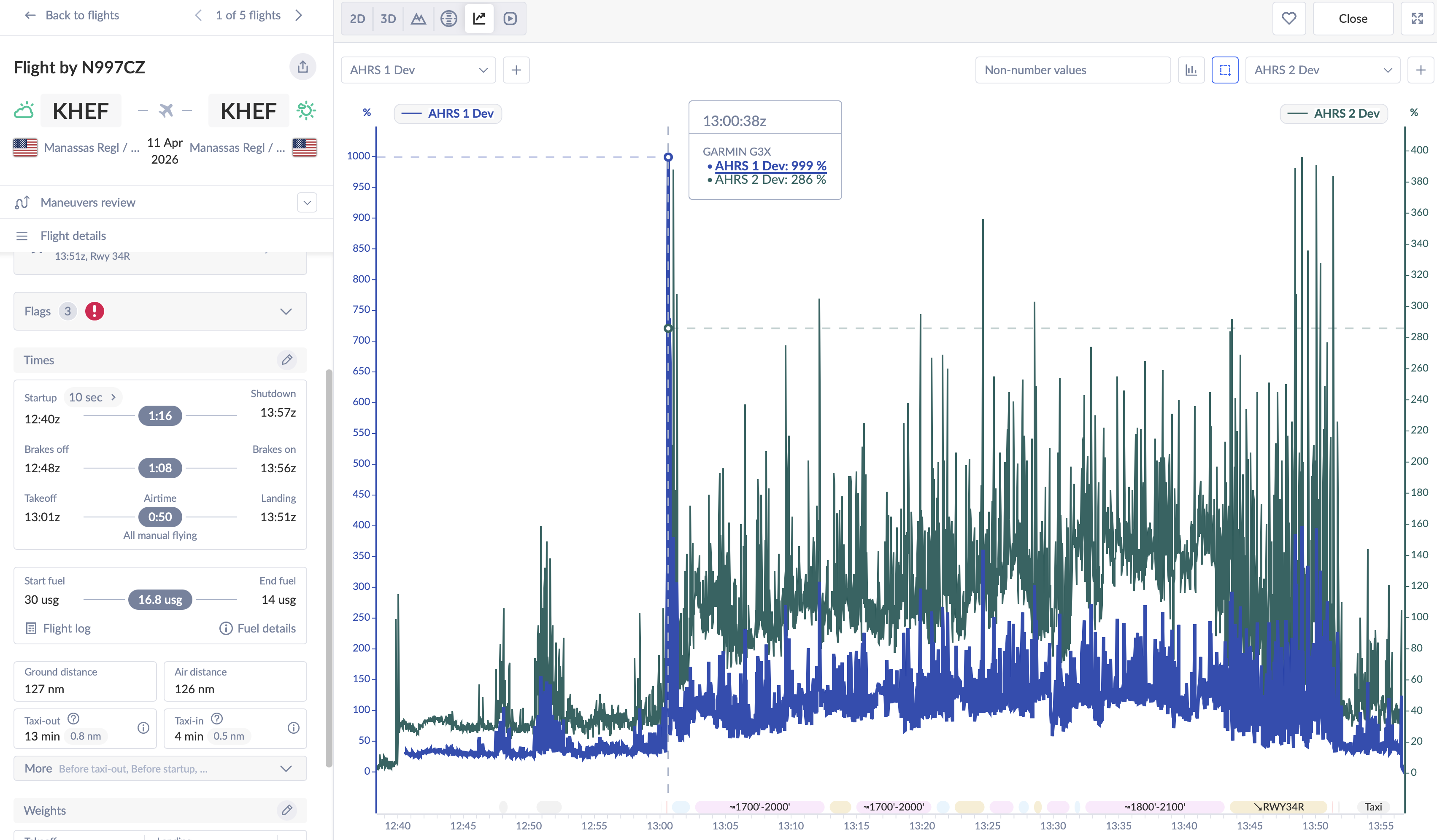
Flight 1 — April 11, 2026 (First Flight, 127 nm)
Flight 1: Large deviation in both units throughout. ADAHRS #2 (teal) consistently worse than #1 (blue), with a hard 999% peak at 13:00:38.
The very first flight and already there’s a clear problem. Both sensors show elevated deviation from shortly after takeoff through landing. ADAHRS #2 is consistently worse than #1, with a hard 999% peak around 13:00:38. The sustained asymmetry between the two units throughout the flight points to a physical difference in what each sensor location is experiencing. The horizon tumbled on this flight — PFD #1 only.
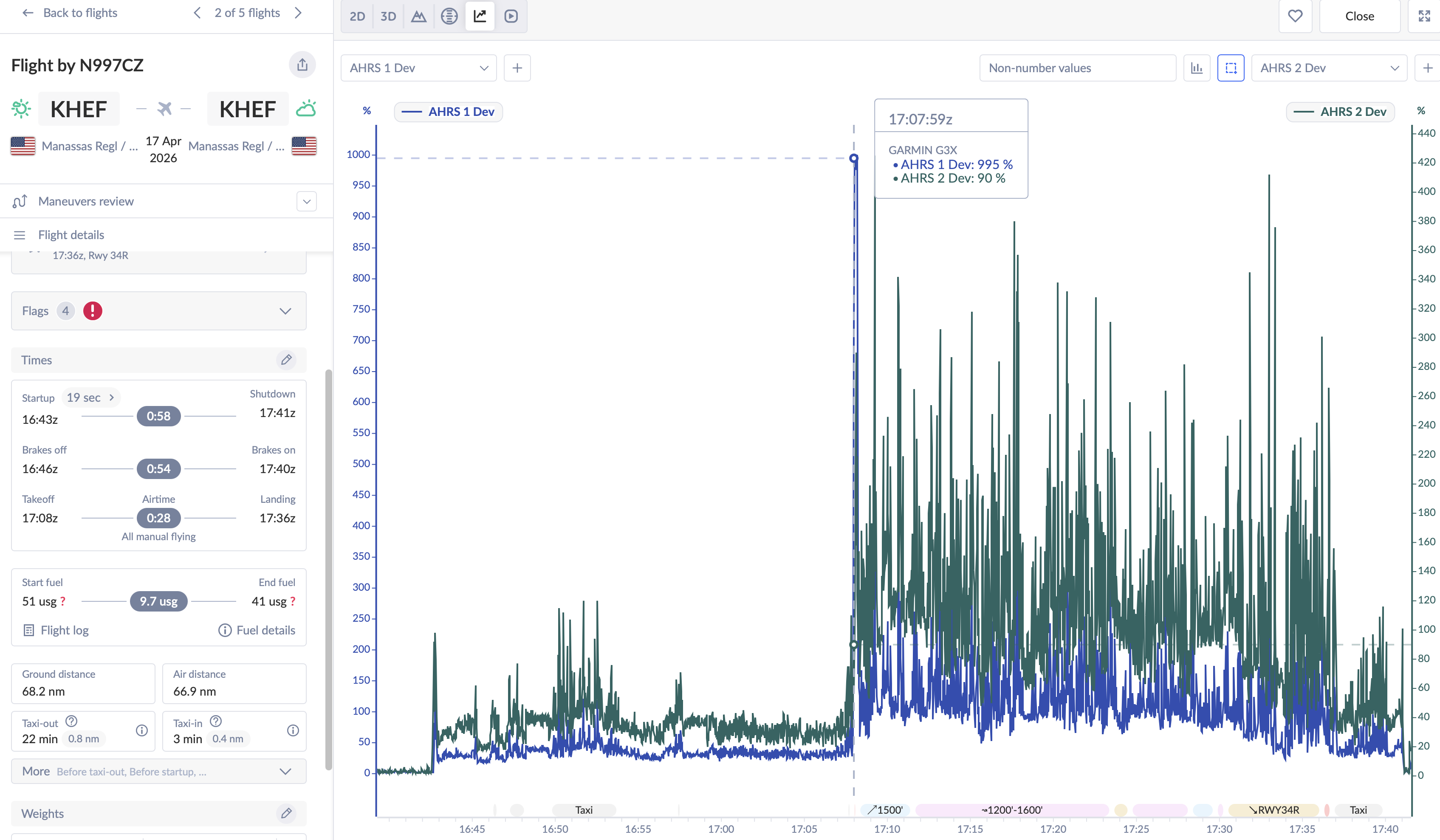
Flight 2 — April 17, 2026 (Abbreviated, 68 nm)
Flight 2: Same sustained pattern. ADAHRS #2 consistently higher than #1, with another 999% peak at 17:07:09.
Identical story to Flight 1. Large deviation in both sensors from takeoff to landing, #2 running consistently worse than #1. The repeatability across two flights makes it clear: this is not random noise. The horizon tumbled again.
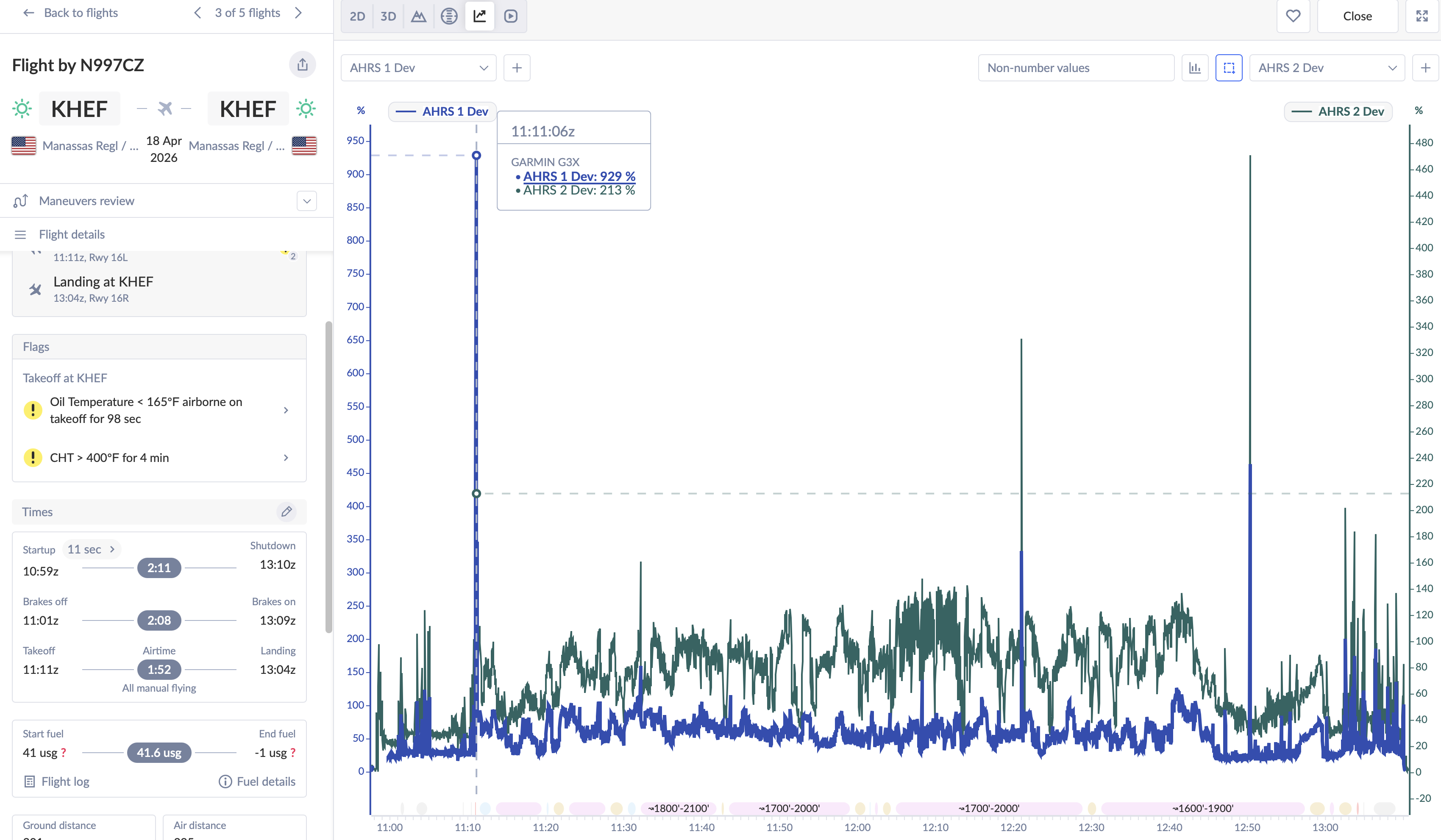
Flight 3 — April 18, 2026 (Two Hours West, Flaps First Time)
Flight 3: Both units elevated throughout. Notable concurrent peak at 11:13:06 — #1 at 229%, #2 at 233% simultaneously.
The two-hour flight shows the same sustained high deviation. What’s notable is a concurrent peak where both sensors reach similar values (229% and 233%) at the same moment — suggesting the disturbance is either broad enough to affect both locations equally, or the CAN bus dropouts confirmed by Garmin are contributing.
Flight 4 — April 18, 2026 (Alternator Belt Discovery)
Flight 4: Sustained deviation throughout, #2 again significantly worse than #1. Peak: #2 at 999%, #1 at 26% at the same timestamp.
Large deviation in both sensors across the whole flight, #2 running consistently worse again. Flight 4 was when we discovered the alternator belt was slipping, though the ADAHRS deviation pattern is consistent with every other flight.
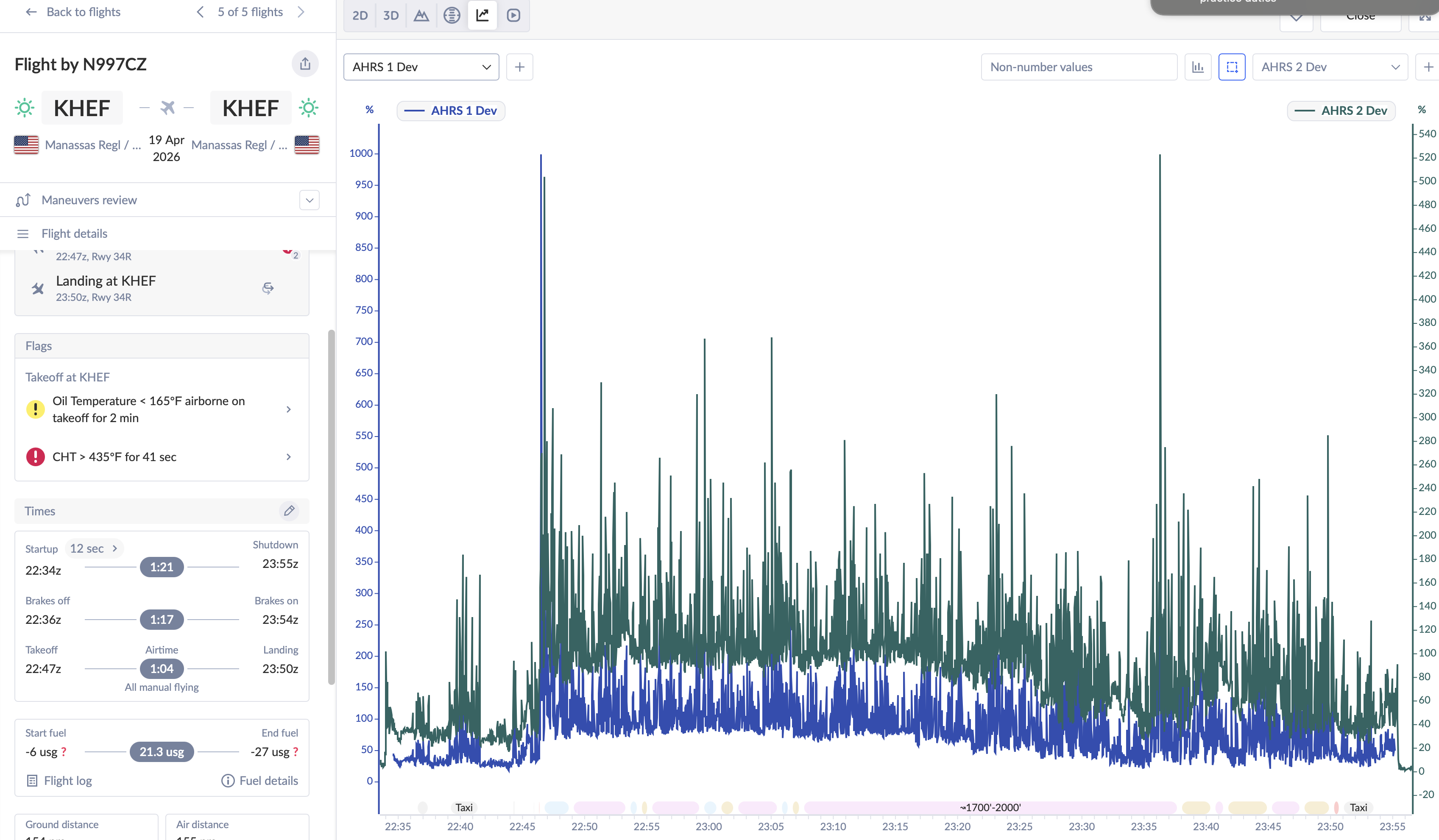
Flight 5 — April 19, 2026
Flight 5: Both units show large, sustained deviation throughout — consistent with every prior flight.
Both sensors show large sustained deviation from takeoff to landing, same as every prior flight. The consistent, high deviation across all five flights is itself the story: this is not a problem that comes and goes — it is present in every flight, start to finish.
Coming next — G5 data: The Garmin G5 is mounted in the main instrument panel, further aft than the two GSU 25Cs on the sub-panel. The sub-panel is tied directly to the firewall via a fore/aft rib, making it a near-direct receiver of engine vibration. The main panel is at the end of a longer structural path with more joints and compliance. If the G5’s deviation runs lower than the GSU 25s — which early recollection suggests — that would directly implicate the sub-panel’s structural coupling to the firewall. That data is being extracted and will be added in a follow-up.
What the Van’s Air Force Community Has Experienced
I posted the data to the N997CZ build thread on VAF and the response was both immediate and sobering: this is a well-known problem, and multiple experienced builders have been down this exact road.
The GSU 25 Mount Location Is the Central Issue
Both GSU 25s are mounted on the sub-panel in the upper-left corner — close to the display, accessible, tidy. But multiple builders reported this location is problematic on the RV-10, and several noted a frustrating catch: Garmin’s ground-based vibration test passes in essentially every position. The only meaningful test is in flight at full power.
The community consensus is that stiffening the sub-panel — adding 0.063 angle stock, doublers, or bracing — doesn’t reliably solve the problem. Making the bracket stiffer just makes it a better conductor of vibration rather than isolating it. Multiple builders who resolved the problem did so by relocating the GSU units entirely: some to the back of the GDU display (despite Garmin’s manual discouraging this), others to a remote aft mount.
The community’s blunt summary: ground vibration tests are a waste of time for diagnosing this. You can’t simulate full power and flight conditions on the ground, and the GSUs will pass the test in any position — then fail in flight. The only data that matters comes from the air.
The Cowling Hinge Pin Fix (An Unexpected One)
One builder shared a fix I wouldn’t have thought to look for: the standard Van’s lower cowl piano hinge vertical pins. Their ADAHRS problem persisted through a sub-panel stiffener and a GSU hardware swap under the Garmin service bulletin. The breakthrough came when someone noticed the lower cowl vertical pins allowed a tiny amount of flex — detectable by hand-pressing the sides of the cowl against the firewall. Replacing those pins with slightly oversized ones resolved the AHRS drift over 30+ hours of subsequent flying.
The diagnostic tell was clean: the ADAHRS ground test passed with the cowl off and failed with the cowl on. N997CZ already uses heavier-than-standard pins, but I’ll be checking the lower vertical pins specifically — it’s a low-cost check worth doing early.
Garmin Service Bulletin SB 2144 — Both My Units Are Affected
Garmin issued SB 2144 specifically addressing GSU 25 units susceptible to “acoustic noise energy” — their language for vibration-induced sensor degradation. The bulletin was traced back to COVID-era supply chain issues that resulted in different MEMS components being used in a production run of units. Both of my GSU 25Cs fall within the affected serial number range.
Some builders had both units replaced under SB 2144 and reported clean results. However, others found the hardware upgrade alone wasn’t sufficient — it took the cowl pin fix or a mount relocation on top of the new units. The SB appears to be a necessary step, but not necessarily sufficient on its own.
Van’s Service Bulletin SB-00028 — Rubber Isolators
Van’s issued SB-00028 (currently RV-12 specific) directing owners to assess ADAHRS performance and, where issues are found, install rubber isolators on the GSU mounts. This directly contradicts Garmin’s guidance to mount to “the stiffest part of the airframe.” The community notes the irony, and the flight experience of multiple builders suggests Van’s got it right.
The Stiff vs. Soft Mount Debate
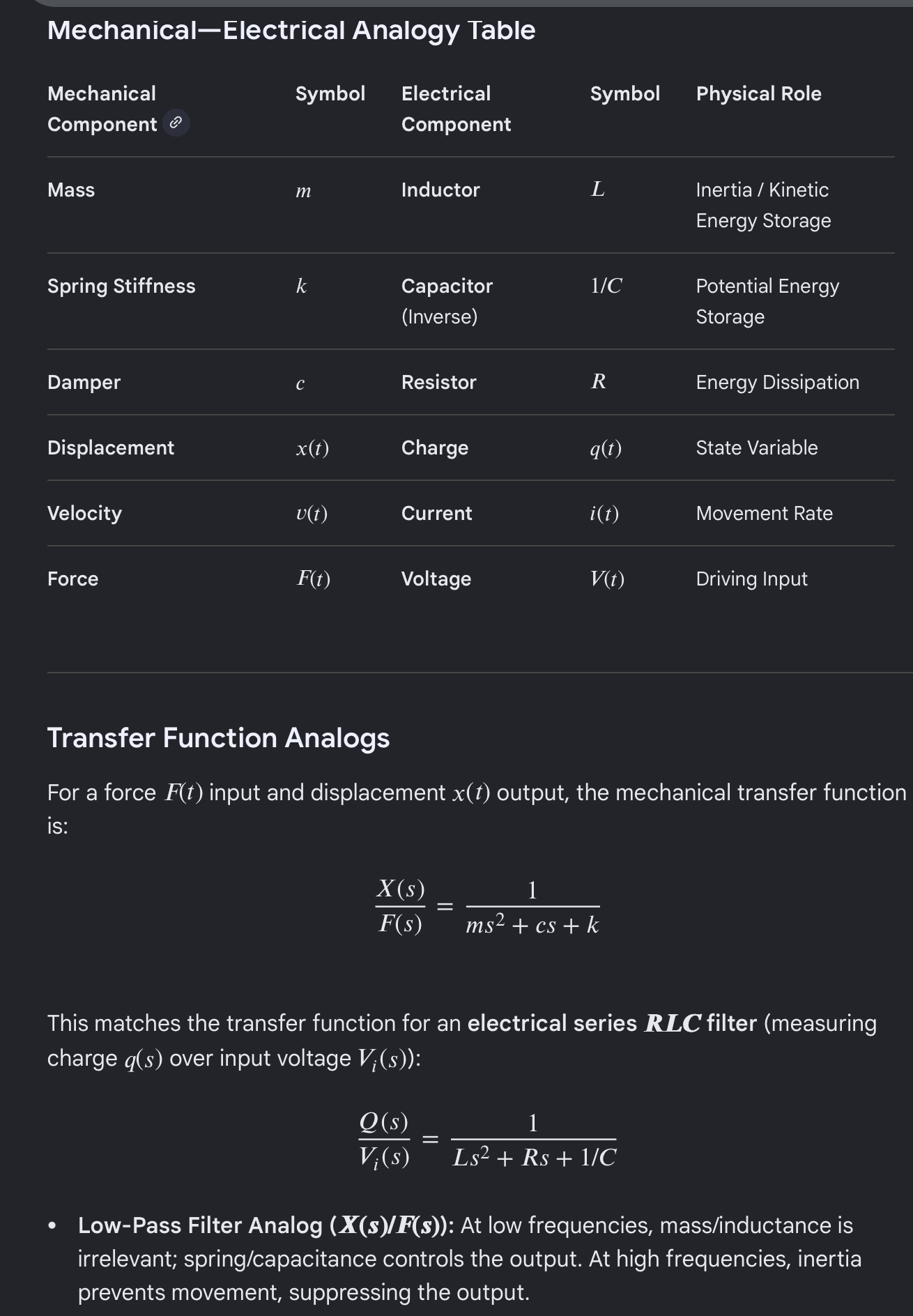
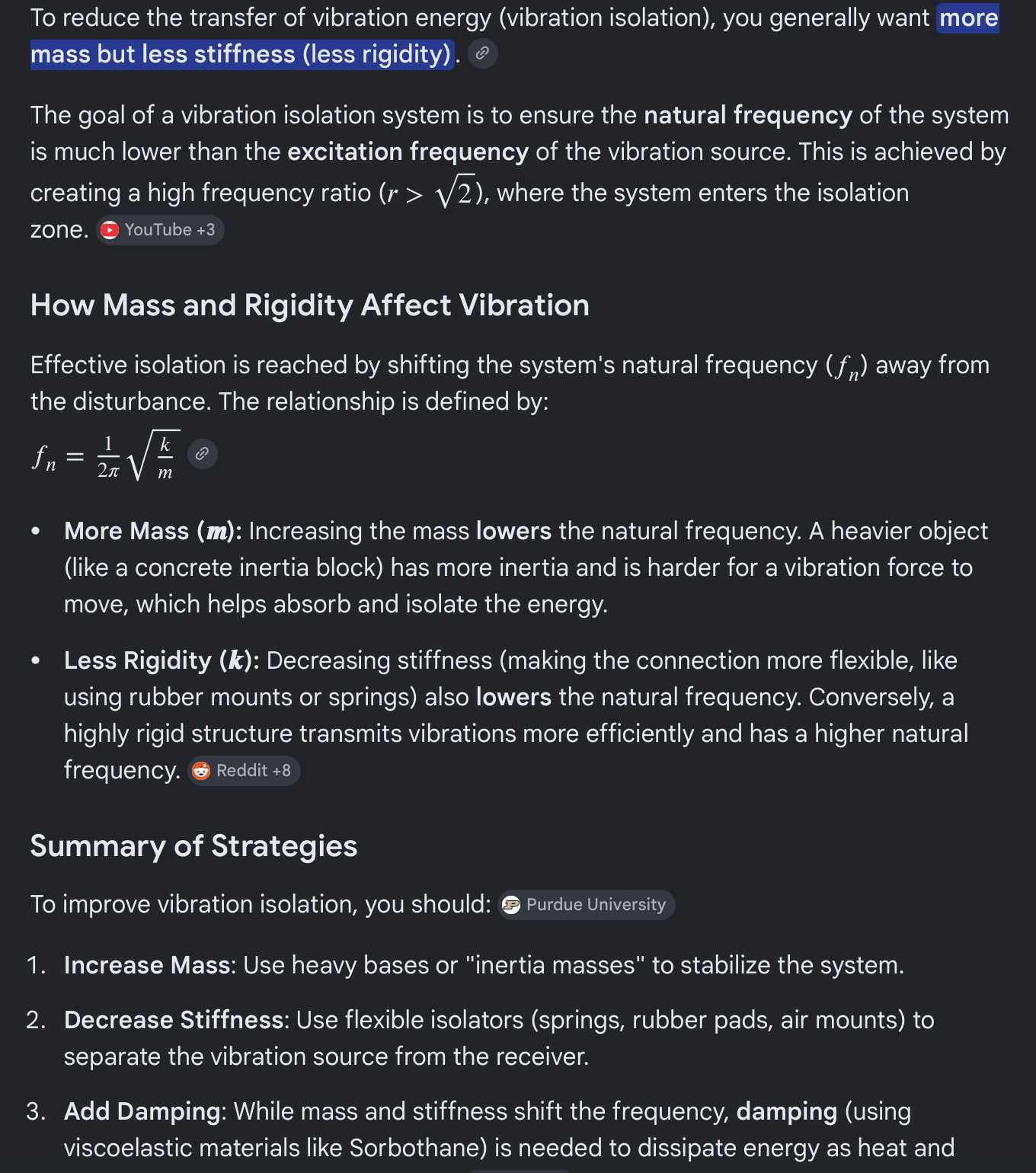
The intuition for stiff mounting is that it keeps the sensor stable relative to the airframe. But that logic breaks down when the airframe itself is vibrating: a stiff connection transmits vibration energy directly into the sensor. The natural frequency of a mounted system is fn = (1/2π) × √(k/m). You want fn well below the engine’s excitation frequencies — which means lower stiffness k and higher mass m. Soft rubber isolators reduce k; adding mass to the isolated platform reduces fn further.
A useful analogy: mechanical vibration systems map directly to RLC electrical circuits — mass to inductance, spring stiffness to 1/capacitance, damping to resistance. A low-pass filter attenuating high-frequency noise is doing the same job as a soft, heavy vibration isolator. The back-of-GDU solution likely works through both added mass and reduced stiffness in the mount path, arriving at isolation inadvertently.
Mechanical mass-spring-damper system and its RLC circuit electrical analog — the math is identical, so filter design intuition translates directly to mount design.Softer spring (lower k) and heavier mass (higher m) both push fn down — the goal is to get the resonant frequency well below the engine’s excitation band.
Even Aft Mounts May Need Additional Reinforcement
One builder who relocated to Van’s designated aft ADAHRS mount (behind the baggage compartment) still had significant vibration issues during Phase 1. The eventual solution was adding substantial metal reinforcement to the mount structure. Their full troubleshooting documentation is in a dedicated VAF thread: GSU-25 Remote Mount Vibration Issue — worth reading before deciding on a relocation strategy.
What Garmin Tech Support Confirmed
CAN Bus Dropouts Confirmed in Flights 1–3
Garmin confirmed intermittent CAN bus dropout signatures in the first three flight logs. What causes the 999% hard pegs specifically has not been established — the dropouts are a confirmed concurrent issue, but attributing those particular readings to the bus alone would be premature. Garmin’s guidance: fix the CAN bus first, get clean logs, then evaluate what vibration problems remain.
CAN Bus Length: ~87 Feet vs. 66-Foot Maximum
Garmin’s maximum recommended CAN bus length is 20 meters (66 feet). My estimate puts the total run in N997CZ at ~87 feet — about 21% over spec. Beyond that length, signal reflections and attenuation degrade bus integrity, especially with non-spec cable.
Wrong Wire: Standard Twisted Pair Instead of 120Ω Controlled-Impedance
The CAN bus requires 120Ω characteristic impedance. Standard aircraft twisted pair (~$1/ft) doesn’t reliably hit that spec, causing signal reflections that look like dropouts at the receiver. Garmin specifically recommends Carlisle IT P/N CAN24TST120(CIT) or GigaFlight P/N GF120-24CANB-1 (~$7/ft). Estimated rewire cost: $420–$560 in cable for a 60–80 ft run.
Two Problems, a Ranked Action Plan
Problem 1 — Fix First (per Garmin): CAN Bus. Wrong wire spec, over-length run, confirmed dropouts. Resolve this completely before evaluating what vibration problems remain.
Problem 2 — Address After CAN Bus Is Clean: Vibration. The tumbling horizon and escalating deviation pattern across five flights make it clear something is wrong — the clean-CAN-bus baseline will tell us how much of it is vibration.
Measure CAN bus run length precisely before ordering wire.
Rewire CAN bus with Carlisle IT CAN24TST120(CIT) or GigaFlight GF120-24CANB-1. Verify 120Ω termination at both ends.
Re-fly and pull fresh logs — establish a known-good CAN bus baseline.
Contact Garmin re: SB 2144 — both GSU 25Cs are in the affected serial number range.
Inspect lower cowl vertical hinge pins for any play. Replace with oversized pins if flex is detectable.
Evaluate GSU mount options — rubber isolators on current sub-panel location, or relocation to GDU back-panel or aft Van’s mount with reinforcement.
Post-fix flight test — five clean flights, deviation at baseline, horizon that stays put.
I’m cautiously optimistic that this is all solvable — the VAF community has collectively worked through every one of these failure modes, and there are clear paths forward. But I want to earn that optimism with data, not just a plan.
If you’ve dealt with ADAHRS deviation on your own build, or have experience with the SB 2144 units, I’d love to hear from you in the comments or over on the VAF thread. This community has already saved me multiple trips down dead ends and I’m grateful for every one of those replies.
N997CZ is a homebuilt experimental aircraft (Van’s RV-10). This post documents personal experience during Phase 1 flight testing. Nothing here constitutes maintenance or airworthiness advice. Consult your avionics manufacturer and A&P/IA for guidance specific to your aircraft.
Flight 2 took place a week after the first flight, on April 17, 2026. If you haven’t read the first flight post, that’s probably the right place to start — it covers the aircraft, the context, and the CHT spike that set the stage for everything that followed.
This one was shorter, more stressful, and ended with a maintenance discovery that turned out to be both the cause of the problem and a straightforward fix. Here’s what happened.
The Setup
The original plan for Flight 2 was the same as Flight 1: west side of the field, 1,800 feet MSL, north-south legs in the practice area. But when I made the coordination call to Manassas tower that morning, the picture changed.
The controller asked me to keep my pattern on the east side of the field. On the east side, they could give me 1,400 feet MSL — 400 feet lower than Flight 1, and on the side of the field with less room to work in. For a second Phase 1 experimental flight, that wasn’t ideal. But it was what was available that day, so that’s what we did.
Full fuel on both sides — 30 gallons left, 30 gallons right.
The Flight
Takeoff was unremarkable except for two things that repeated from Flight 1: the AHRS-1 attitude indicator tumbled on the takeoff roll (same behavior as before — isolated to PFD1, PFD2 and the G5 standby both remained stable), and CHTs spiked above the warning limits during climb. This time all six cylinders went over 435°F, peaking somewhere in the 460–475°F range before settling down. Higher than Flight 1’s peak, which was unwelcome, and attributable to the later time of day and warmer ambient temperatures.
We were at 1,400 feet MSL with a compact pattern on the east side of the field. Not exactly the relaxed cruise conditions you’d want for watching CHTs settle, but the temperatures did come down as we moved out of the climb and into cruise power.
Then the Oil Temperature Started Misbehaving
Flight 1 had shown clean, stable oil temperature throughout. Flight 2 did not.
Partway through the flight, the oil temperature gauge spiked suddenly to an obviously unrealistic reading — well above what oil temperature can physically reach in a few seconds. I knew it wasn’t a real temperature (temperature can’t rise that fast), but an erratic gauge is still an erratic gauge. I noted it and kept flying.
It happened again. Then a third time — and this time the gauge didn’t just spike, it went dark. No reading at all for a minute or two.
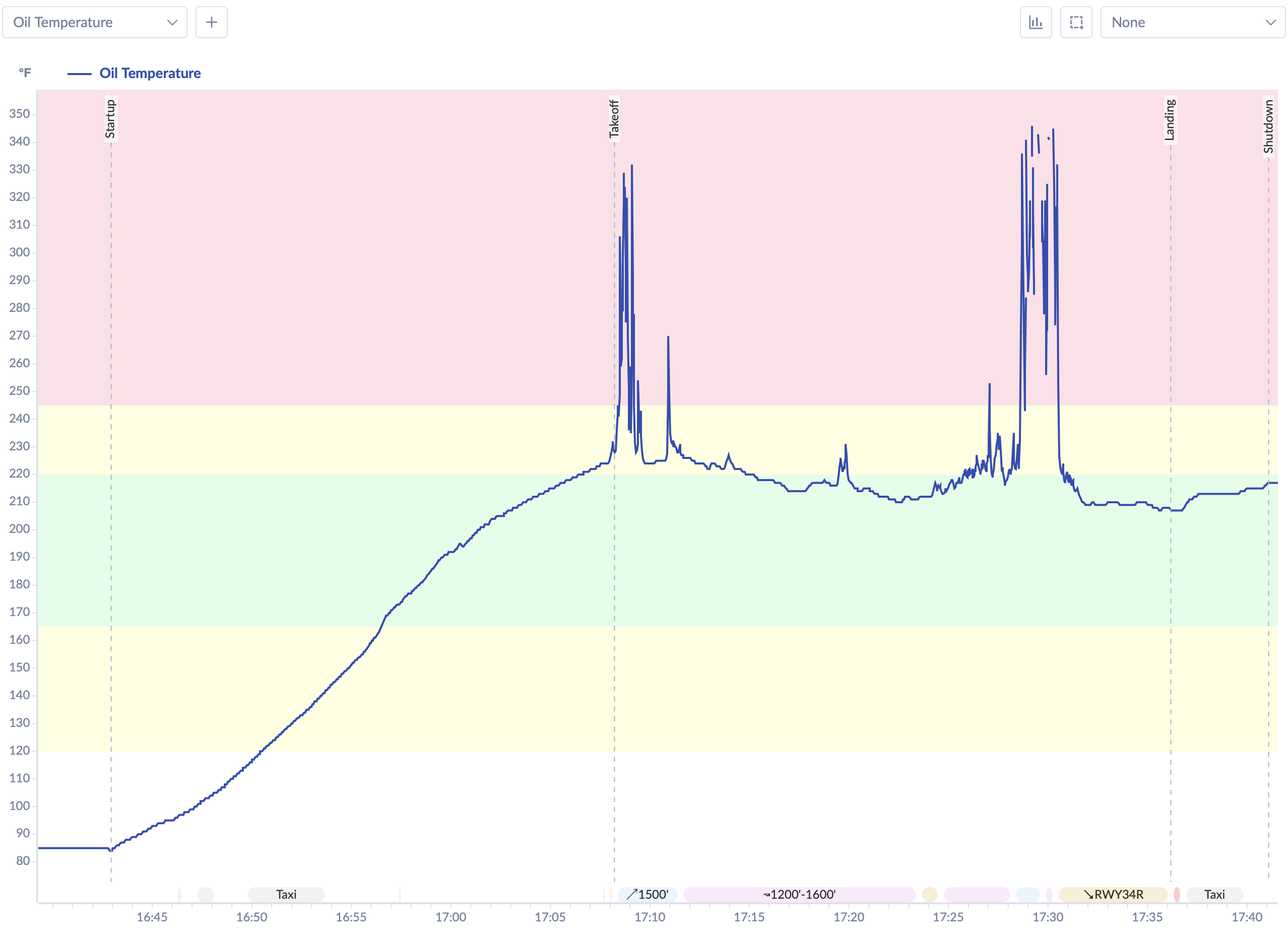
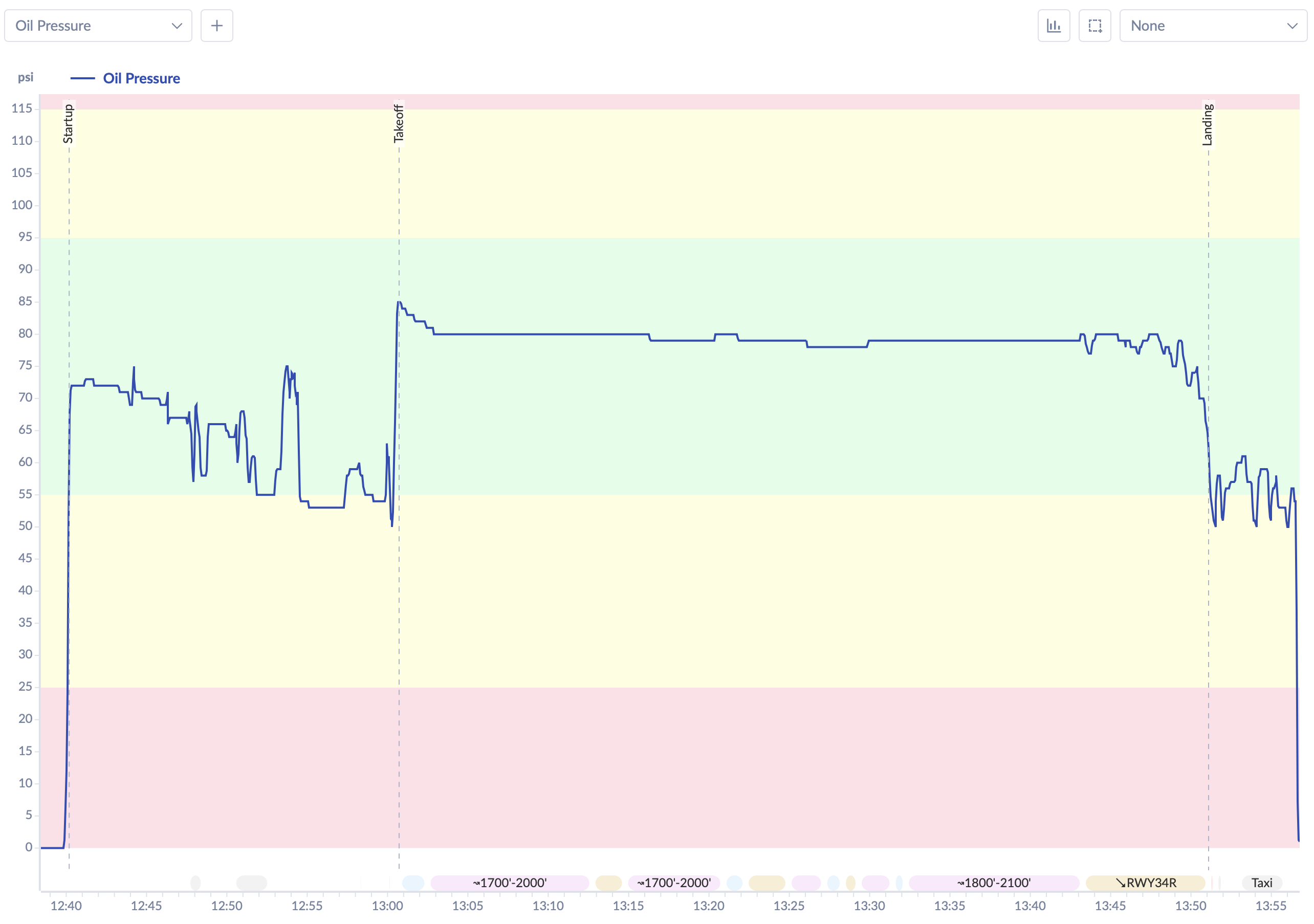
The oil temperature trace from Flight 2. Three erratic spikes to off-scale high readings, followed by the gauge going completely dark. Oil pressure remained stable throughout — the problem was instrumentation, not the oil system itself.
Oil pressure was steady the entire time — 75–80 psi, never wavering. That was reassuring. A failed oil system shows up in the pressure first; the pressure was fine. But flying with no oil temperature indication, in a tight pattern at 1,400 feet, on a second experimental flight, with CHTs that had already been high — that was enough. I made the call to land early and figure it out on the ground.
Total flight time: approximately 28 minutes. Fuel burned: 9.5 gallons from the left tank (confirmed by both the totalizer and the fuel truck, which put exactly 9.5 gallons back in).
The Diagnosis
Post-flight, we went looking for the cause. It didn’t take long.
In the firewall-forward wiring, near the oil temperature probe, we found a crimp connector that hadn’t grabbed the wire properly. When we unwrapped the bundle and pulled on the wire, it came free by hand — zero resistance. That was the culprit: an intermittent connection that would open under vibration, spike the reading to an implausible value, then reconnect. The third time it disconnected, it stayed disconnected long enough to drop the gauge entirely.
I’d actually noticed some finickiness with these wires before the first flight — wiggling the bundle in the hangar had produced erratic gauge readings on the ground. I wasn’t able to reproduce it consistently enough to isolate the cause before Flight 1, and it didn’t manifest during Flight 1. It clearly manifested during Flight 2.
The fix: re-do the crimp, properly this time. Wrap the bundle back up. Done.
Flight 3 would show whether the fix held.
What I Took Away
Flight 2 was short and more stressful than I’d planned. But the outcome was fine—nothing broke, I made a conservative decision to land when my instrumentation became unreliable, and we found and fixed the actual problem before the next flight. That’s the process working as it should.
A few things I’m carrying forward:
Known issues need abort criteria before departure. If something is behaving oddly on the ground, decide in advance what you’ll do if it shows up in the air. Don’t leave that decision for the moment.
Airspace coordination is worth doing ahead of time—and worth holding firm on. Getting assigned the east side at 1,400 feet added unnecessary pressure to an already-demanding flight. For subsequent flights, I’ve made a point to coordinate specifically for the west side of the field. Until I have full confidence in the aircraft and it’s ready to venture further outside the Class Delta for the remaining flight test program, having the more open, higher-altitude practice area on the west side is genuinely important—not just a preference. I’d encourage any experimental builder doing early Phase 1 testing at a busy Class D airport to have that conversation with the tower in advance, and be clear about what you need and why.
The fuel totalizer appears accurate. Having the refueled quantity match the totalizer reading exactly was a genuinely useful data point—I’m more confident in that system now.
As always, if you’ve been through something similar—erratic instrumentation on an early test flight, a wiring issue that surfaced at an inconvenient time, or a tricky judgment call about when to land—I’d really like to hear about it in the comments. I don’t have all the answers on this airplane yet, and the conversations here have been more useful than I expected.
We had hoped to be wheels-up by 6:30 AM. First flights have a way of humbling your schedule.
The day actually started on time — at around 6:30 AM we were already on the radio with the Manassas tower, working through the coordination that my operating limitations required before I could fly. That conversation shaped the flight plan for the morning. I asked the controller for 1,800 feet MSL inside the Class Delta, offset between one and two miles west of the runway, with north and southbound legs west of the field. It was a compromise altitude — lower than I would have liked for gliding distance safely, but it was as high as we could go inside the Delta without conflicting with Washington Dulles airspace to the north. The tower was accommodating and we had our area sorted.
What we didn’t have sorted quite yet was the aircraft. By the time we’d finished the walkaround, coordinated with the local fire department (who graciously agreed to stand by on-field — something I’d strongly recommend to any first-time experimental flyer), and began taxiing out, it was closer to 8:30. Two hours of pre-dawn nerves, checklists, and quiet conversations on the ramp.
The fire crew’s presence wasn’t just a safety net — it was a reminder of how seriously we were taking this. This wasn’t a routine departure. This was the culmination of years of building, hundreds of hours in the hangar, and a lot of faith in the process.
What Came Before: Engine Time at First Flight
One thing worth noting for anyone following along with their own build: we kept pre-flight engine running to an absolute minimum.
By the time we lined up on RWY34R that morning, the engine had seen just two cold starts and one brief taxi test to break in the brakes — probably less than 10 minutes of total run time prior to the day of the first flight. The conventional wisdom on Lycoming break-in is to get the engine to altitude quickly, run it hard, and let the rings seat properly. So we kept ground time short and intentional. I believe this is also to prevent “gazing” the cylinder walls — a condition that can occur from prolonged low-power operations before the engine is thoroughly broken in, and which can make proper ring seating much harder to achieve afterward.
That philosophy was tested on the morning itself. The long taxi out gave the engine time to heat up, and by the time we completed our run-up, CHTs had climbed to around 405°F — already nudging our yellow warning limit. I made the call to pull back to idle for a couple of minutes and let things cool down before attempting the takeoff roll. It was the right call: temperatures settled, we confirmed everything was in order, and we lined up.
We knew engine temperatures were going to be a story on this flight. We just didn’t fully anticipate how much of a story.
The Flight Area
Per my operating limitations and the coordination with Manassas tower, the first flight was conducted inside the Class Delta airspace, one to two miles west of the runway at 1,800 feet MSL, with north and southbound racetrack legs west of the field.
The altitude was a deliberate trade-off. Higher would have been better for cooling airflow and giving me more options in an emergency, but 1,800 feet was the ceiling we could use without stepping into Dulles’s airspace. You work with what you have.
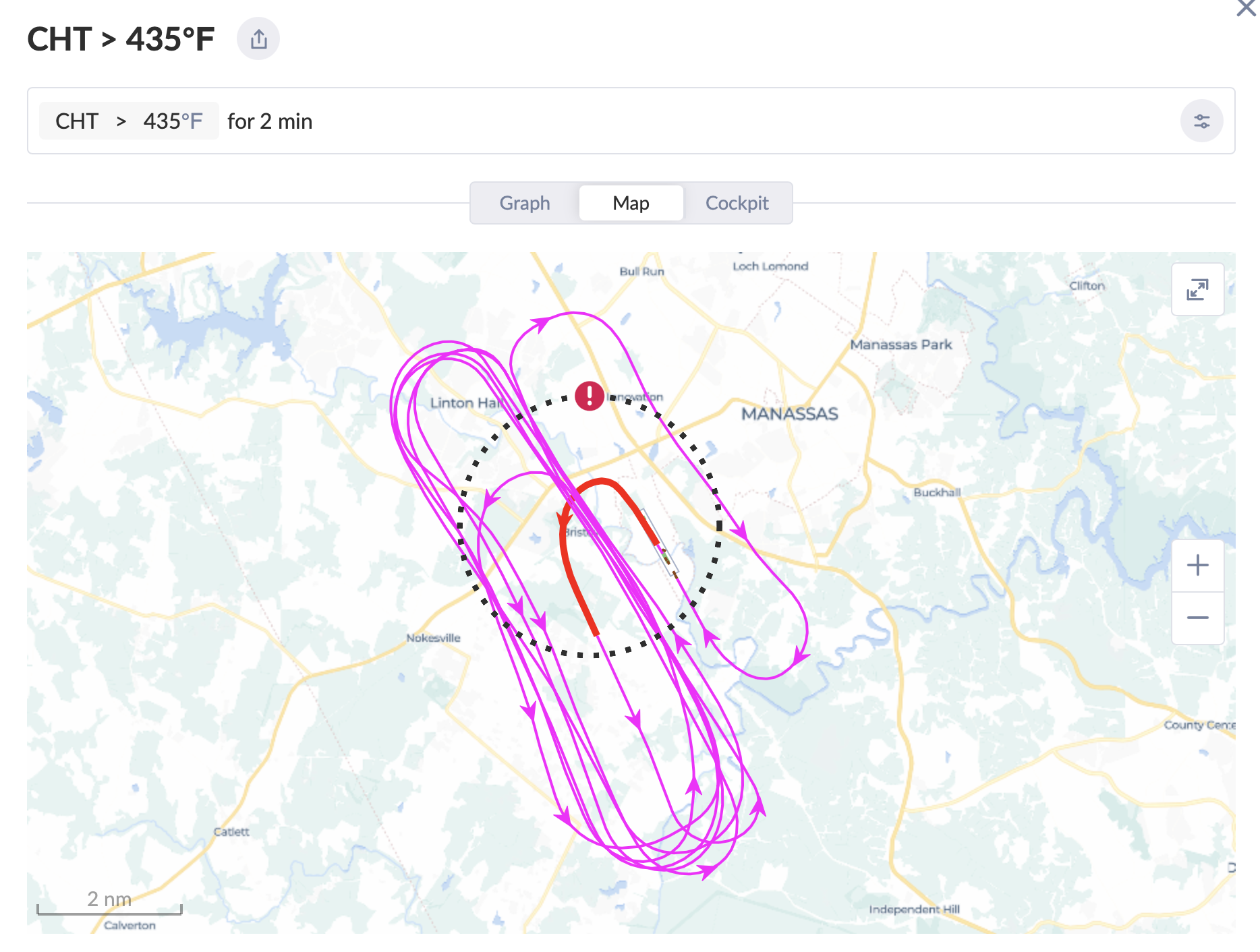
Flight track over Manassas (KHEF). Red segment marks where CHTs exceeded 435°F — concentrated at the departure end of RWY34R.
Takeoff and Climb: The CHTs Tell the Tale
Liftoff from RWY34R was clean. The RV-10 accelerated exactly as I was expecting — consistent with the seven hours of transition training I’d done with Mike Seeger in Vernonia, Oregon before the build was complete. That experience paid off; there were no surprises on the runway and the controls felt immediate and responsive — more on the flight characteristics in a future post. For now, let’s talk about what the engine monitor was screaming at us.
We had configured our warning limits conservatively for the first flight:
Yellow (caution): 400°F CHT
Red (warning): 425°F CHT
Remember, CHTs were already at around 405°F during run-up, before we even started the takeoff roll. The climb loaded the engine further and temperatures rose quickly.
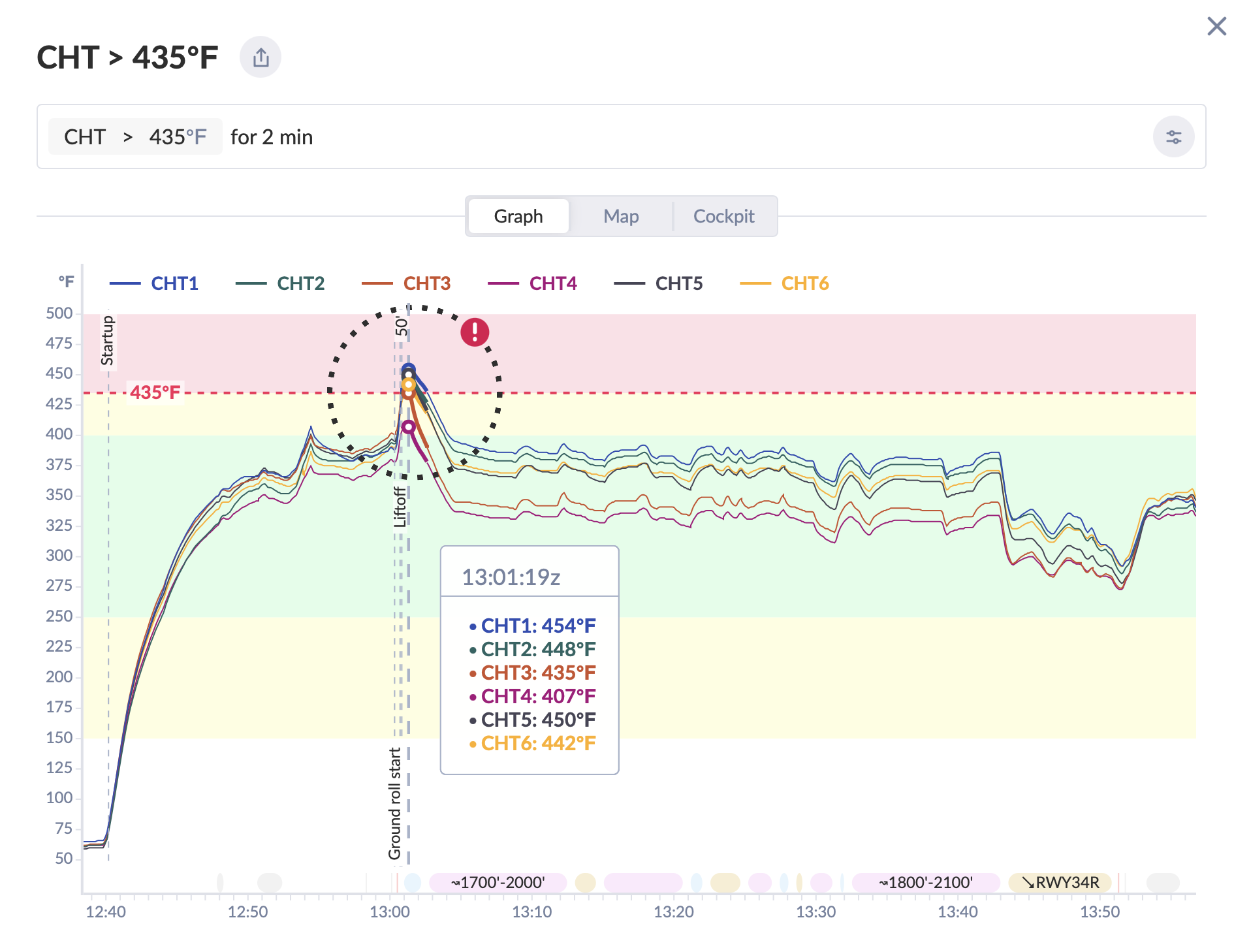
At 13:01:19 UTC — roughly a minute after liftoff — cylinder head temperatures peaked across the board:
Cylinder
Peak CHT
CHT 1
454°F
CHT 2
448°F
CHT 3
435°F
CHT 4
407°F
CHT 5
450°F
CHT 6
442°F
Five of six cylinders exceeded our red warning limit. CHT1 hit 454°F — well into territory that gets your attention. The aircraft’s engine monitor was painting a very pink picture.
All six CHTs during the first flight. Peak at 13:01:19 UTC with CHT1 reaching 454°F. Temperatures were above 435°F for approximately 2 minutes before trending down.
The good news: we had expected elevated temperatures during break-in, had briefed the scenario, and had a plan. We maintained climb power, kept the nose slightly lower than we might otherwise to maximise airflow, and watched the numbers. Within about two minutes, CHTs began their descent back toward normal operating range and continued to trend down through the rest of the flight as the engine settled in.
Not everything was alarming, though. Oil temperature and oil pressure both told a completely different story — and a reassuring one.
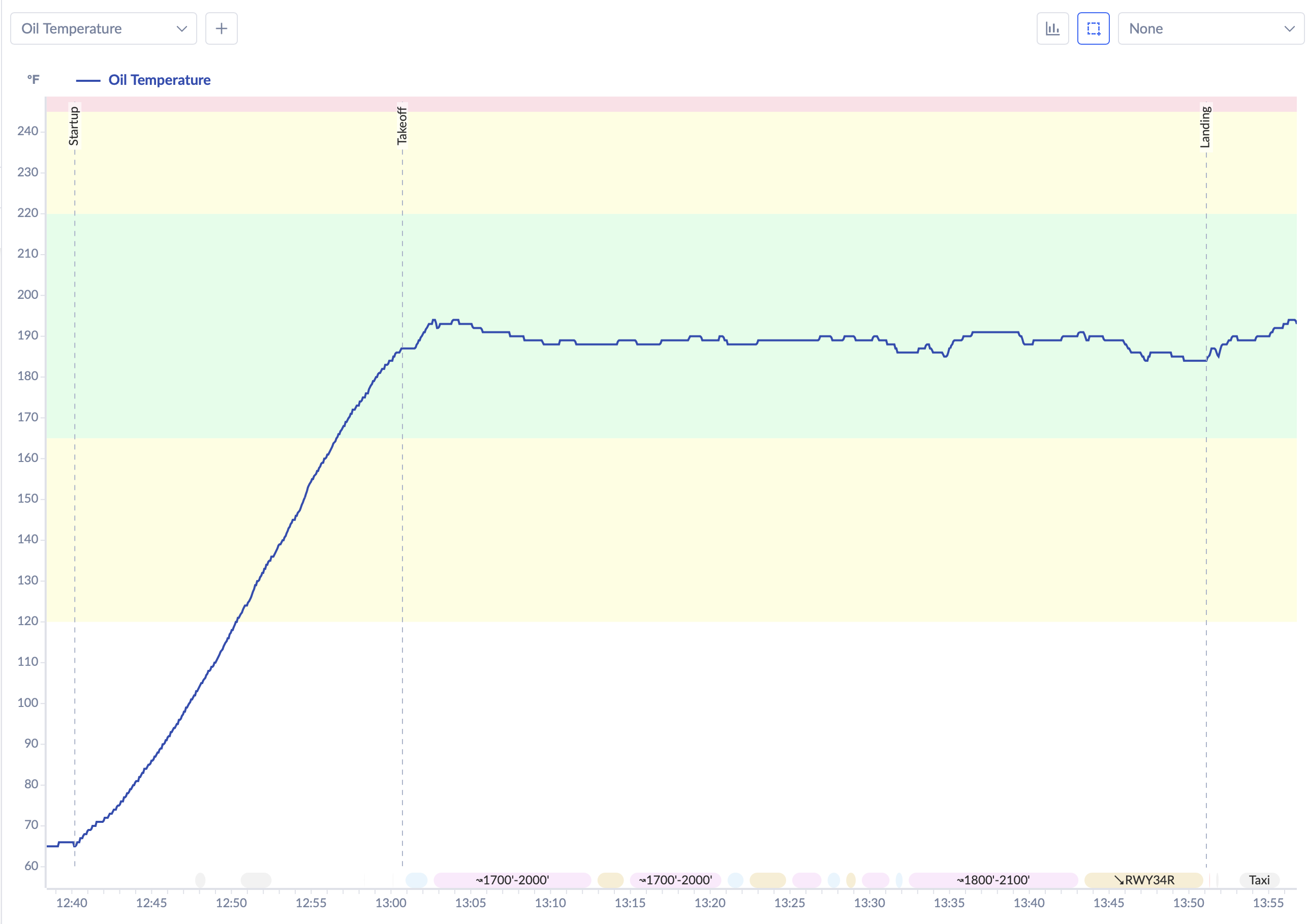
Oil temperature started around 65°F at engine start, climbed steadily through the long taxi, reached roughly 185–190°F by the time we lifted off, peaked at around 195°F shortly after takeoff, then settled into a rock-solid band of 185–195°F for the entire flight — squarely in the green, never threatening the yellow or red zones. Whatever the CHTs were doing, the oil temperature was happy throughout.
Oil temperature throughout the flight. Climbed steadily during taxi, peaked at ~195°F shortly after takeoff, then held a stable 185–195°F band for the duration — solidly in the green zone throughout.
Oil pressure was equally well-behaved. It jumped to around 70 psi immediately at startup, showed some normal variability during taxi at idle power, then spiked cleanly to ~85 psi as full power was applied for takeoff. From there it held a steady ~80 psi through the entire flight — solidly in the green band — before settling back down during the taxi in after landing. On a brand new engine, seeing oil pressure that stable and consistent is exactly what you want.
Oil pressure throughout the flight. A brief spike to ~85 psi at full-power takeoff, then a steady ~80 psi through the pattern — well within the green band for the entire flight.
The flight track map tells the same story geographically — you can see the red segment (CHT > 435°F) concentrated right over the departure end of the runway, fading as we worked through our planned pattern to the southwest of the airport.
One other thing you’ll notice if you watch the cockpit video: the primary flight display — connected to Attitude and Heading Reference System number one (AHRS-1) — tumbled during the takeoff roll. Importantly, this was isolated to screen one. Primary flight display two, connected to AHRS-2, remained solid throughout, as did the G5 standby attitude indicator. So while the artificial horizon on screen one was misbehaving, we had two other reliable attitude references in the cockpit the entire time. The image below captures it clearly — PFD1 on the left showing a wildly incorrect attitude while PFD2 on the right remained perfectly stable.
PFD1 (left, circled) showing a tumbled attitude during the takeoff roll. PFD2 (right, circled) and the G5 standby both remained solid throughout.
Notably, AHRS-1 corrected itself shortly after takeoff — before we even reached the first turn — so the tumble was brief. That said, “it fixed itself” isn’t a satisfying answer for a system you’re counting on, and it’s not ideal, absolutely something that needs to be resolved before any IFR or night flight. It’s sitting lower on the priority list right now while we focus on the engine temperatures. One squawk at a time.
The Builder’s Conundrum: Run It Hard vs. Take It Easy
Here’s the tension nobody talks about enough.
A brand new Lycoming needs to be run like you stole it. Full power, or as close to it as you can manage, for as long as it takes to get the rings to seat against the cylinder walls. We’re talking an hour or two of hard running — sustained high power, letting the pressure in the combustion chamber do the work of pushing those rings out and wearing them in. The payoff is a marked drop in cylinder head temperatures on subsequent flights as the seal improves and the engine breathes properly. You watch for that drop like a hawk.
But running an engine flat-out is exactly at odds with what you want to do with a brand-new airframe. Every builder’s instinct — and the right instinct — is to build up slowly. Fly a little conservatively at first. Take things one step at a time. Get familiar with the aircraft before you start pressing limits.
Those two requirements don’t coexist gracefully.
This isn’t our first rodeo — we previously built and flew an RV-7A (N997RV), and we had elevated cylinder head temperatures on the first several flights of that aircraft too. That experience helps. You know the temperatures are coming, you’ve seen the trend lines before, and you have some confidence that the numbers will fall as the engine breaks in. But it doesn’t make the decision any easier when you’re staring at 454°F on CHT1 and trying to decide how hard to push a machine you’ve spent years building.
What We Learned
A few takeaways that might help others approaching their own first flight:
1. Brief the temperature scenario in advance. We had talked through “what do we do if CHTs spike” before we ever started the engine that morning. That meant when the warnings lit up, there was no panic — just a pre-briefed response.
2. Watch your pre-takeoff temps carefully. The long taxi and run-up had already pushed CHTs to ~405°F before we ever lifted off. That warm baseline mattered. If temperatures had continued to climb during run-up, I would have aborted and tried again later in the day. Knowing your limits — and sticking to them — is the whole game.
3. Keep the new engine ground running time to a minimum — get it flying at high power quickly. The elevated temps during climb are part of that process — uncomfortable to watch, but expected.
4. Coordinate your airspace early. The 6:30 AM tower call was one of the better decisions of the morning. Having the flight area locked in before we even went through the walkaround meant one less variable to manage when we were ready to fly.
5. Set your limits to inform, not alarm. Our conservative warning thresholds (400°F yellow, 425°F red) meant we were informed early. Some builders set limits higher to avoid nuisance alerts; I’d argue starting conservatively and adjusting based on data is the better approach.
6. Have the fire department on standby and mean it. Not as a formality. Talk to them beforehand, make sure they know the aircraft and where you’ll be operating. They were professional, prepared, and I hope we never need them — but knowing they were there made a difference. We also brought them donuts as a bribe, which we highly recommend as part of any first flight preflight checklist.
What’s Next
The RV-10 is now officially a flying machine. Phase 1 flight testing has begun, and there’s a lot of data to collect and share. Future posts will cover:
Flight handling and control harmony
Engine break-in progress and CHT trends over the first 25 hours
Performance numbers vs. the Van’s specs
Lessons learned from the build that showed up on the flight line
If you’re building an RV-10 (or any experimental), I’d love to hear from you. Drop a comment below or reach out directly — the EAA community is one of the best parts of this whole journey.